

С неба - под воду - 10
- Опубликовано: 09.02.2025, 19:38
- Просмотров: 1121
Содержание материала
Глава 6
НЫРЯЮЩИЕ САМОЛЕТЫ В XXI ВЕКЕ
В период с 1971 по 1999 гг. в мире было сделано много нового в таких областях прикладной науки как материаловедение, аккумуляция электроэнергии, топливные смеси для авиационных и ракетных двигателей, микроэлектроника и компьютерная техника. Благодаря этому в 2000–2014 гг. появились несколько новых проектов ныряющих летательных аппаратов.
Концепция Г. Хокса (2000)
Начнем с англичанина Грэма Хокса (Graham Hawkes; 1947 г.р.), переселившегося в 1980-е годы в США, в Сан-Франциско.
СПРАВКА
Г. Хокс родился и вырос в Лондоне, получил профессию инженера- судостроителя.
В 1976 г. совместно с компанией OSEL из Грейт-Ярмута (Great Yarmouth) в графстве Норфолк (Великобритания) 29-летний Хокс разработал жесткий скафандр «Wasp» для глубоководного погружения.
В 1978 г. он спроектировал одноместный погружаемый аппарат «Mantis» с дистанционными манипуляторами. Этот аппарат был использован в фильме студии «Pinewood» о Джеймсе Бонде «Только для твоих глаз» (1981 г.). Хокс сам управлял им во время киносъёмок в 1980 г.
В 1981 г. Хокс спроектировал первый в серии одно- и двухместных подводных аппаратов «Deep Rover».
В том же году он вместе с Сильвией Эрл (Sylvia Earle) основал компанию «Deep Ocean Technology» (DOT). А в 1982 г. вместе с ней основал фирму «Deep Ocean Engineering» (DOE) в Сан-Леандро (штат Калифорния). Компания построила более 300 аппаратов типа «Deep Rover»!
В том же 1982 г. Хокс построил подводный аппарат «Challenger» (“Претендент”), способный погружаться на большие глубины — до 1500 м.
В 1985 г. компания «DOE» построила глубоководный исследовательский подводный аппарат «Deep Rover». Рекордное погружение на 910 м состоялось неподалеку от острова Сан-Клементе (San Clemente). Аппарат спустили в воду с судна «Egabrag III», пилотом был сам Хокс. Глубина спуска фиксировалась через каждые 100 м.

Самый известный «подводный самолет» Г. Хокса – двухместный аккумуляторный «SuperFalcon». Длина 6,4 м, размах крыла 2,74 м, вес 1816 кг. Опускается на глубину 1000 футов (305 м) и проплывает 25 миль (46,3 км).
Его стоимость 1,7 млн долларов
В 1998 г. Хокс завершил проект двухместного аппарата «Deep Flight II». В 2000 г. он построил «DeepFlight Aviator», тоже с положительной плавучестью и крыльями. Первый серийный экземпляр этого типа был назван «Spirit of Patrick».
В 2008 г. Хокс построил первый аппарат «Deep Flight Super Falcon», который затем продал миллиардеру Тому Перкинсу. а в 2010 г. миллиардер Ричард Брэнсон купил первый образец аппарата «Deep Flight Merlin» и дал ему название «Necker Nymph». Это мини-лодка с положительной плавучестью и крыльями относится к «мокрому типу»: пилот находится в кабине, заполненной водой и использует акваланг.

Подводный самолет «Black Hawk» Г. Хокса (2014 г.)
В 2014 г. Хокс спроектировал и построил спортивную подводную лодку «Black Hawk» с крыльями. Аппарат длиной 17 футов (5,18 м) оснащен прозрачным акриловым фонарем для пилота и светодиодными фарами в носовой части.
Он изготовлен из композитного материала и весит около 1270 кг. Его аккумуляторные батареи обеспечивают несколько часов плавания и до 24 часов жизнеобеспечения.
Размах крыльев 6 футов (183 см), под ними установлены два электромотора. Основные крылья дополнены более короткими крыльями в хвостовой части — для создания обратной подъемной силы. Аппарат способен выполнять под водой фигуры высшего пилотажа. Управляемый при помощи джойстика, «Black Hawk» делает бочку, мертвую петлю и даже выпрыгивает из воды как дельфин.
Хокс говорит, что «Черный ястреб» способен достигать «края тьмы», глубина которого в большинстве районов океана составляет не менее 1000 футов. Всего его компания построила 3 экземпляра «ястребов» по 1,35 млн долларов каждый.
В 2000 г. Хокс рассказал корреспонденту журнала «New Scientist», как он попытался решить ключевые проблемы, связанные с созданием самолета, способного двигаться в двух средах — или, другими словами, НЛА. Тогда он был настроен весьма оптимистично, ссылаясь на достижения в области легких композитных материалов из углеродного волокна и энергоемких электробатарей.
Хокс говорил: "Уже нет причин, по которым это невозможно сделать".
По его мнению, конструкция «Аэрошипа» компании «Convair » была удачной.
Отказ от громоздких поплавков сделал НЛА достаточно лёгким как в воздухе, так и в воде. Но какой способ погружения оптимальный? Одним из решений является простое затопление фюзеляжа водой, но при этом экипажу придется использовать водолазное снаряжение и тяжелые баллоны со сжатым воздухом.
Поэтому лучше поместить экипаж в водонепроницаемую кабину. А для противодействия её плавучести можно заимствовать еще одну идею из конструкции «Аэрошипа» — топливные баки в виде резиновых баллонов. Тогда аппарат можно погрузить в воду, пустив воду в пустоты, освобожденные топливом, использованным во время полета.
Для всплытия воду нетрудно откачать насосами. Для движения под водой лучший вариант — электроэнергия.
Правда, тут есть одно «но»:
Использование аккумуляторов для привода электродвигателей под водой поможет противодействовать плавучести НЛА. Но, к сожалению, батареи могут серьезно подорвать его пригодность к полету.
В то же время невозможно построить самолет, который будет погружаться под воду точно так же, как подводная лодка. Вы смешиваете два принципиально разных режима работы.
И Грэм Хокс нашел оригинальное решение этой проблемы: он начал строить подводные лодки с положительной плавучестью — сначала в виде действующих макетов. Чтобы преодолеть эту плавучесть и удерживать мини-субмарины на некоторой глубине, Хокс оснащал их крыльями, которые направляют «подъемную силу» вниз:
Думайте об этом как о полёте под водой. Чтобы летать как под волнами, так и над ними, крылья должны быть немного необычными. Важно то, что крыльям погружаемого аппарата требуется симметричный аэродинамический профиль, в отличие от асимметрично изогнутого крыла, которое обеспечивает подъемную силу самолета*.
* Журнал «New Scientist», 12 февраля2000 г., с. 36.
Когда аппарат находится в воздухе, крылу требуется положительный «угол атаки»: другими словами, оно должно быть отклонено вверх относительно воздушного потока. Для этого аппарату надо лететь с приподнятым носом. И наоборот, под водой ему требуется отрицательный угол атаки, поэтому он должен двигаться немного носом вниз.
На такую мысль Хокса натолкнули ныряющие морские птицы:
Придется опустить нос и буквально нырнуть в воду с сильным всплеском подобно олуше или кайре.
Затем Хокс построил полномасштабный погружаемый аппарат с короткими крыльями «Super Falcon», который, по расчетам, на небольшой глубине может развивать скорость до 10 узлов (18,5 км/час) и способен опускаться на глубину до 300 метров!
По мнению Хокса, если оснастить такой аппарат авиационными реактивными двигателями и более длинными крыльями, он сможет летать в воздухе со скоростью до 900 км/час!
Важно то, что на этих очень разных скоростях характеристики потоков воздуха и воды, обтекающих движущийся аппарат, и определяемые параметром, известным как число Рейнольдса (Reynolds number), примерно одинаковы, поэтому крылья и рулевые плоскости аппарата должны хорошо работать в обеих средах.
Хокс признал, что для того, чтобы поднять «Super Falcon» в воздух, требуется очень много энергии, и с этой задачей могут справиться только реактивные двигатели. С ним согласился Норман Полмар, консультант правительства США по вопросам военно-морского флота. Он отметил, что поршневые двигатели, обычно используемые в легких самолетах, исключены по очень простой причине: они выйдут из строя, если в цилиндры попадет вода. Полмар сказал:
"Вы не можете погрузить поршневой двигатель в воду и ожидать, что он заработает. Но защитите реактивный двигатель от коррозии в солёной воде и расположите его высоко на гидросамолете, чтобы брызги не попадали в воздухозаборник во время взлета и посадки, и тогда он будет работать нормально. Российский авиаконструктор Бериев доказал это своим самолетом-амфибией Бе-200".
Хокс предсказал, что реактивные двигатели будут играть двойную роль, двигая самолет как в воде, так и в воздухе. По его мнению, нет причин, по которым лопатки компрессора и турбины реактивного двигателя не могут приводиться в движение электромотором для создания тяги под водой. Вполне возможно построить двигатель, который в полёте будет работать на керосине как воздушно-реактивный, а при погружении в воду переключаться на электричество и работать как водомёт.
В этой связи Хокс напомнил, что у большинства реактивных двигателей есть электростартер, и его можно приспособить для вращения вала турбины под водой. Он понимал, что в воде лопасти будут вращаться намного медленнее, чем в воздухе, однако важно то, что субмарина будет плыть.
Действительно, в 2007 г. производитель самолетов «Airbus» запатентовал гибридный электрореактивный двигатель для авиалайнеров, который может работать на авиационном керосине и на электричестве.
Однако схеме Хокса по использованию обычного реактивного двигателя для движения в двух средах (в воздухе и воде) препятствует очень большой камень. Об этом предупредил инженер Джим Маккенна (JimMcKenna) из Управления гражданской авиации Великобритании, который исследовал специфику погружения авиационных двигателей:
"Нельзя допускать попадания холодной морской воды на горячий двигатель, потому что тепловой удар разорвет его на части. Охлаждение реактивного двигателя занимает очень много времени, поскольку турбина работает при температуре между 500 и 600 °C."
То есть пока не найдено решение проблемы быстрого охлаждения реактивного двигателя, ныряющему самолету придется часами ждать на поверхности, прежде чем он сможет погрузиться.
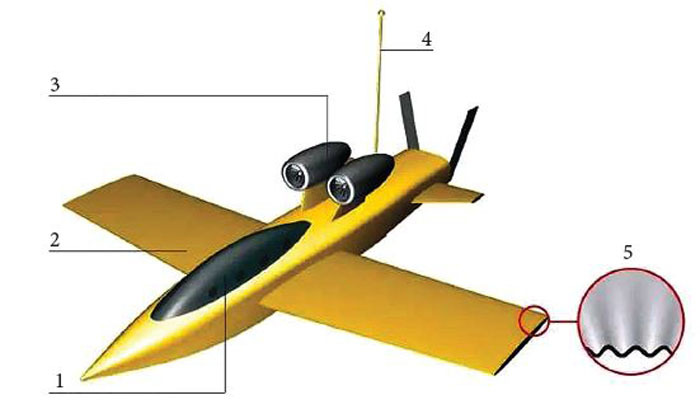
1) Водонепроницаемая кабина (отсек) для пилотов и пассажиров; 2) гибкие крылья; 3) гибридные реактивные турбины, способные работать в воздухе и воде; 4) выдвижное устройство для подачи воздуха к турбинам (или к топливным элементам) в подводном положении аппарата; 5) профиль гибких законцовок крыльев
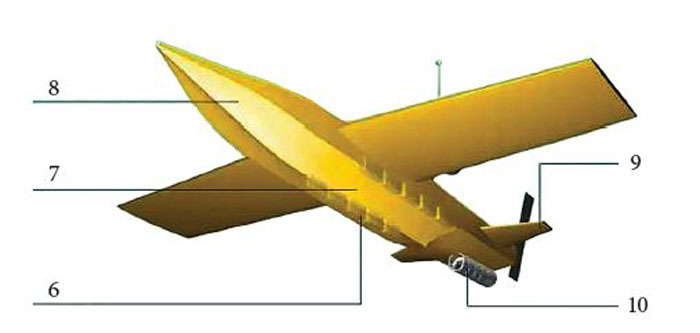
6) топливные элементы; 7) фюзеляж композитной конструкции; 8) топливные баки и фюзеляж частично наполняются забортной водой для регулировки плавучести; 9) тангаж; 10) выдвижной гребной винт для движения под водой
Судя по тому, что Хокс не построил ныряющий летательный аппарат, решить эту проблему ему не удалось. Он пошел по другому пути: развернул строительство по заказам богачей двухместных и одноместных прогулочных подводных лодок нового типа, обладающими положительной плавучестью и оснащенных крыльями. Их называют «подводными самолетами» (submarine planes). В настоящее время они очень популярны среди тех, кто способен платить более миллиона долларов за игрушки для себя, любимых.
И хотя с момента изложения Хоксом своей идеи прошло уже 25 лет, не слышно, чтобы кто-нибудь построил самолет с крыльями, изменяющими угол атаки для пикирования с неба под воду.
Инициатива DARPA
В начале октября 2008 г. агентство перспективных исследований Министерства обороны США (DARPA) опубликовало заявление, имевшее три любопытных аспекта.
Во-первых, в нём были признаны неудачными все предыдущие проекты летающей подводной лодки (flying submarine):
Предыдущие попытки продемонстрировать аппарат, обладающий качествами как подводной лодки, так и самолета, искали способы наделить летными возможностями платформы, наиболее подходящие для подводных операций. Эти попытки не увенчались успехом, во многом потому, что требования к конструкции подводной лодки и самолета диаметрально противоположны.
Во-вторых, DARPA обратилось к инженерному сообществу США с просьбой спроектировать самолет, погружающийся в воду. Агентство заявило, что с 1 декабря 2008 г. ждет поступления проектов с «реалистично обоснованным бюджетом», а также с перечнем экспериментов, нужных для реализации проекта.
В-третьих, были изложены основные требования к проекту.
Агентство ожидает, что проект представит десантную машину скрытного действия со специфическими возможностями самолета, надводного корабля и подводного судна, что значительно повысит тактические возможности флота Соединенных Штатов. [...] Проект должен решить проблемы в области конструктивного проектирования двигателя, обладающего эффективной тягой в режимах с двумя потоками (воздуха и воды), а также управляющих поверхностей, работающих в двух средах.
Агентство хотело получить самолет, способный без дополнительной заправки топливом преодолеть 1224 морские мили (2267 км). Это расстояние складывается из 1000 миль (1850 км) в полёте на высоте 500–2500 футов (152–762 м), 200 миль (370 км) в бреющем полёте над самой водой или в плавании по воде, и 24 мили (44,5 км) под водой. При этом 1112 миль (с вычетом 100 миль бреющего полета и 12 миль под водой) необходимо преодолевать максимум за 8 часов.
Самолет должен брать на борт 8 человек (двое пилотов, шесть бойцов спецназа и/или операторов спецоборудования). Плюс к ним 2000 фунтов (908 кг) полезного груза.
Ныряющий самолет DARPA. Рисунок из журнала «Flight International» не имеет ничего общего с каким-либо конкретным проектом
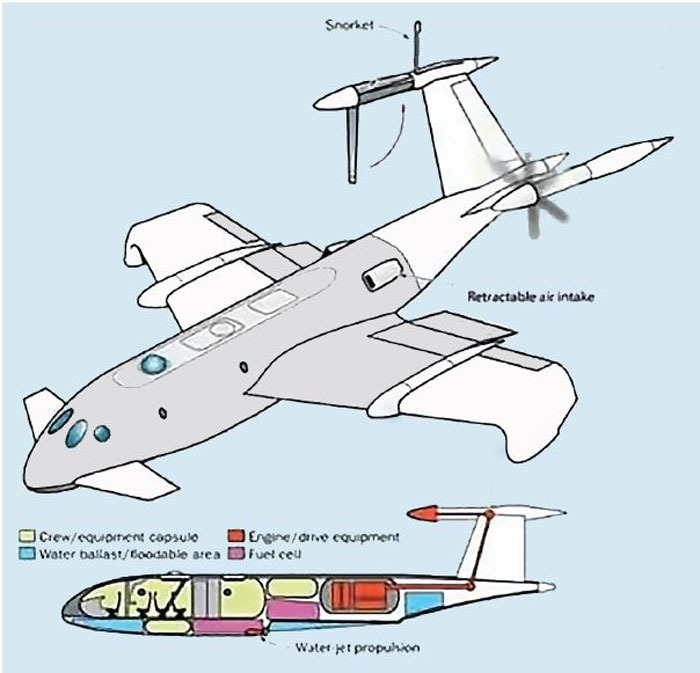
Надо обеспечить подачу атмосферного воздуха в двигатели самолета, плывущего на глубине не более 8 метров, через специальное устройство («шноркель»)*.
* Немецкое слово «schnorkel» (завиток) — условное обозначение устройства, подающего воздух из атмосферы к дизель-моторам подводной лодки, идущей на перископной глубине. В России его называют РДП.
Самолет должен иметь возможность находиться под водой без движения 72 часа и сохранить способность к взлету и полету по истечении этого времени.
Благодаря тому, что DARPA потребовало спроектировать именно самолет, способный погружаться лишь на небольшую глубину, проектировщики могли значительно снизить требования к статической и динамической нагрузке на машину в погруженном положении.
Благодаря такой концепции стала возможной практическая реализация идеи ныряющего самолета.
Здесь уместно сказать, что в декабре того же года британский журнал «Flight International» опубликовал статью, посвященную инициативе DARPA, которую сопроводил цветным рисунком погружающегося самолета (submersible aircraft)*.
* «Flight International» — самый старый авиационный журнал в мире. Издается с 1909 г.
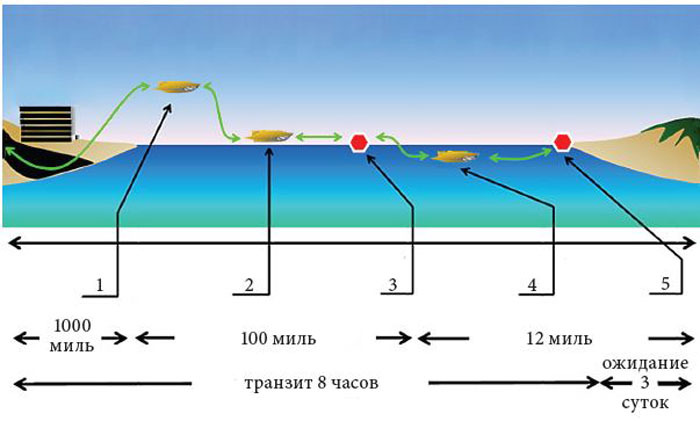
1) Старт с наземного аэродрома и полет на расстояние до 1850 км; 2) бреющий полет над водой 150–185 км; 3) в 20–25 км от берега самолет погрузится в воду; 4) высадка на берег спецгруппы и ожидание в подводном положении до 3-х суток ее возвращения, время от времени выдвигая на поверхность перископ и трубу воздухозаборника; 5) прием группы на борт, удаление на безопасное расстояние от берега, взлёт и возвращение на базу (мили указаны морские)
Рисунок получил широкое распространение в интернете. Однако он является выдумкой художника журнала и не имеет отношения ни к одному реальному проекту!