

С неба - под воду - 11
- Опубликовано: 09.02.2025, 19:38
- Просмотров: 1119
Содержание материала
Проект «Sail Fish» (2009)
В январе 2009 г. группа в составе четверых студентов и профессора Дэниела Б. Колти (Daniel B. Coltey) из университета в Оберне (Auburn university), что в штате Алабама, представила публикацию под названием «Концептуальный проект подводного тактического десантного самолета».
[...] Главная цель проектирования... создание проекта подводного самолета — осуществляется отчасти в ответ на запрос Агентства перспективных оборонных исследовательских проектов (DARPA).
Проектировщики подсчитали, что ионно-литиевые аккумуляторные батареи, необходимые для ныряющего летательного аппарата, способного пройти под водой 44 км (22 морские мили), будут весить столько же, сколько все остальные компоненты аппарата вместе взятые, что сделает такой НЛА слишком тяжелым для полета*.
* В 1953 г. французский физик Андре создал первый образец серебряно-цинкового аккумулятора (СЦА). Но у этого новаторского прибора был существенный недостаток. Электрод из цинка, установленный в нем, довольно быстро растворялся. Через 5 лет (в 1948 г.) Андре нашел способ создания батареи, в которой цинковые электроды не растворяются. В СЦА анодом служит пластина из оксида серебра, а катодом пластины из окиси цинка и цинкового порошка. Электролит — едкий калий, растворенный в воде в определенной концентрации. Серебряный положительный электрод помещен в конверт из прочного лозного материала, не пропускающего электролит. Он защищает электрод от активной щелочной среды. СЦА намного эффективнее и удобнее свинцово-кислотных аккумуляторов. Но при этом они намного дороже. Поэтому главная область их применения — военная техника. Первые ионные аккумуляторы создали англичанин Майкл С. Уиттингем (1970) и американец Джон Гуденаф (1980). Но у них были три серьезных недостатка: низкое напряжение (2–4 В), высокая цена и склонность к самовозгоранию. Наконец, в 1991 г. японец Акира Ёсино изобрел аккумулятор с анодом из графита и катодом из кобальтата лития. Он стал практичным и безопасным.
Поэтому они решили вместо аккумуляторов использовать газовую турбину. По их мнению, турбовальный агрегат, оснащенный большими лопастями несущего винта и шестернями для регулировки скорости, обеспечит «приемлемую эффективность» как в воздухе, так и в воде.
Проект «Sail Fish»
А воздух в турбину погруженного самолета будет поступать через 10-метровую трубу (шноркель), выдвинутую из моря. При этом НЛА останется близко к поверхности воды. Но ограничение глубины не имеет особого значения. Боб Оллвуд (Bob Allwood), исполнительный директор Общества подводных технологий в Лондоне, сказал:
"Пока её [трубу] не видит противник, нет особой причины нырять глубоко".
К сожалению, в интернете нет ни одной схемы этого «концептуального проекта». В своей публикации они не указали ни размеры своего ныряющего самолета, ни его тактико-технические характеристики.
Приведенный здесь рисунок даёт лишь приблизительное представление о том, как он должен был выглядеть.
Проект «Carderock» (2010)
В 2008–2010 гг. специалисты Центра надводных боевых действий флота (Naval Surface Warfare Center — NSWC) «Carderock» (в штате Мэриленд) разработали проект «ныряющего самолета», исходя из требований DARPA. В нём они сформулировали круг задач и проблем, характерных для подобных проектов, а также предложили два варианта их решения на основе имеющихся технологий.
Целью работы было определение возможности создания пилотируемого погружающегося самолета, способного взлететь с поверхности моря, преодолеть 640 км по воздуху и пройти 12 морских миль (22,2 км) под водой, после чего высадить группу боевых пловцов. А затем взять на борт вернувшуюся группу, снова пройти 12 миль под водой, потом взлететь и пролетев ещё 640 км вернуться в исходную точку.
Конструкторы сочли оптимальной компоновку типа «летающее крыло» с выступающим из него фюзеляжем большего объема, стреловидной передней кромкой крыла и двигателями на его верхней и нижней поверхностях. В крыле находятся баки и цистерны различного назначения, а также своеобразные понтоны плавучести в его нижней части, в фюзеляже — герметичная кабина для двух-трех пилотов и грузопассажирский отсек (6 пассажиров) в верхней части, понтон внизу. При взлёте и посадке используются гидролыжи.
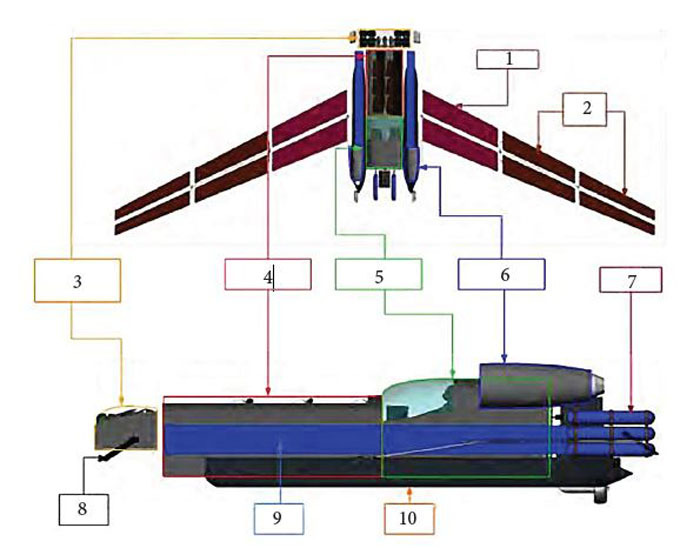
Общая компоновка аппарата NSWC «Carderock» 1 — топливные баки; 2 — балластные цистерны; 3 — снаряжение спецназа; 4 — отсек для бойцов спецназа; 5 — кабина пилотов; 6 — турбовентиляторные двигатели; 7 — пневматическая система; 8 — устройство для швартовки; 9 — аккумуляторы; 10 — подушка плавучести
Силовая установка состоит из двух турбовентиляторных двигателей для полёта и винто-рулевой колонки с электромотором для плавания на поверхности воды и под водой.
Внутри фюзеляжа и крыла размещены кабина для 2-х пилотов и отсек для 6 десантников. Инженеры NSWC «Carderock» разработали два варианта НЛА.
Вариант 1
Размах крыла: 28,04 м. Длина: 10,97 м. Взлетный вес: 16798 кг. Полезный груз: 340,5 кг. Крейсерская скорость: 320 км/ч. Подводная скорость: 6 узлов (11,1 км/ч).

Вариант 1
Вариант 2
Размах крыла: 33,22 м. Длина: 10,36 м. Взлетный вес: 17 706 кг. Полезный груз: 340,5 кг. Крейсерская скорость: 320 км/ч. Подводная скорость: 6 узлов (11,1 км/ч).

Вариант 2
Во втором варианте размах крыла больше на 518 см, при этом его длина меньше на 61 см, и он тяжелее на 908 кг. Другие характеристики совпадают.
Разработчики построили несколько масштабных моделей. На них они проверили различные способы взлёта и посадки, а также погружения и работы на небольших глубинах. Для перехода из одной среды в другую удалось найти оптимальные инженерные решения.
По результатам проведенной работы конструкторы сделали вывод о принципиальной возможности создания на основе имеющихся технологий грузопассажирского погружающегося самолета, полностью соответствующего требованиям Агентства перспективных исследований.
Но и эта разработка не получила развития в реальных проектах. Правда, ходили слухи о секретном продолжении опытноконструкторских работ, но за 15 прошедших лет такая машина на летных испытаниях не появилась.
Проект QFS-20 (2014)
В 2014 г. Сиддалл и Ковач (Siddall & Kovač) из Имперского военного колледжа (Великобритания) опубликовали в «The Journal of Bioinspiration & Biomimetics» статью, посвященную бионическому проекту водно-воздушной беспилотной платформы. Чисто внешне их проект похож на разработку центра «Кардерок ».
Они теоретически разработали конструкцию ныряющего летательного аппарата на основе новейших доступных технологий. Он предназначен для того, чтобы преодолевать в полёте расстояние от точки старта до места проведения операции, что резко сокращает общее время движения по сравнению с водным транспортом.
В зоне операции QFS-20 (Quick flying squid — «скоростной кальмар 2020 года») входит в воду, чтобы сохранить скрытность, а когда операция завершена, взлетает и летит назад к месту старта.
Используя метод бионического проектирования, Сиддал и Ковач предложили ключевые принципы создания воздушно-водных аппаратов такого типа:
1) погружение в воду пикированием, подобно тому, как это делают ныряющие птицы;
2) складывание крыльев вдоль корпуса, как у таких птиц, для эффективности погружения;
3) использование водометных движителей по принципу движения кальмара;
4) применение гидрофобных покрытий корпуса и крыльев для отталкивания воды, чтобы они в момент взлёта были сухими — как туловище и перья ныряющих птиц.
Был построен крошечный экспериментальный водомётный движитель для демонстрации возможностей подобной конструкции. Масса этого механизма составила 2,6 грамма, длина — 6,57 см. Он мог подниматься на высоту 4,8 м, что в 72 раза превысило его длину.
Следовательно, такой двигательный механизм обладает высокой удельной мощностью. Этот факт открывает перспективы применения водомёта пилотируемыми и беспилотными летательными аппаратами, способными работать в воде и в воздухе (Aqua UAVs), а также другими бионическими плавающими и прыгающими по воде роботами.
Суть проекта
QFS-20 — это аппарат с реактивным двигателем для полёта и двумя водомётами (или гребными винтами) для подводного плавания.
Обеспечение возможности работы в двух средах является большой проблемой при проектировании НЛА. Решение её в этом проекте включает в себя применение следующих решений:
1. Использование гидрофобных (несмачиваемых) покрытий всех наружных частей НЛА, что значительно уменьшает прилипание воды к ним;
2. Герметизация крышек впускных и выпускных отверстий;
3. Использование водомётов как наиболее эффективных подводных движителей;
4. Применение ракетных ускорителей для увеличения скорости НЛА при его взлёте из-под воды.
Наиболее важными компонентами QFS-20 являются три системы: реактивный двигатель, подводный двигатель и корпус в виде крыла с утолщениями.
Двигатели. Система реактивного двигателя включает в себя один реактивный двигатель, два воздухозаборника с крышками и два выпускных сопла, тоже с крышками. Чтобы избежать попадания воды из воздухозаборников в реактивный двигатель, крышки закрывают входные отверстия, пока QFS-20 находится под водой. А когда он находится в воздухе, крышки открыты.
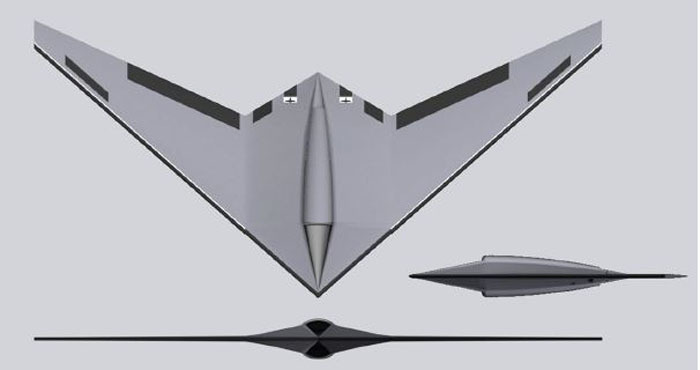
НЛА QFS-20 (вид сверху, спереди, сбоку)
Система подводного двигателя включает в себя топливный бак, бак со сжатым воздухом, трубу подачи топлива, трубу подачи воздуха, сам двигатель, гребной вал, гребной винт, подводный лифт, выхлопной канал двигателя. Воздушный трубопровод подает окислитель к подводному двигателю, а топливный провод — горючее к нему. Эта система позволяет аппарату плыть под водой. При этом рули глубины за каждым винтом позволяют ему изменять глубину погружения быстрее, чем рули на крыле.
Подводный двигатель вращает гребной вал, вал вращает гребной винт. Пока двигатель сжигает топливо, он также производит газ, который выходит через выхлопную трубу.

Ускорители. Это две небольшие ракеты на твердом топливе. Поскольку НЛА должен развить высокую скорость под водой, чтобы создать подъемную силу в момент выхода из воды, а подводный двигатель не способен развить нужную скорость, уско- рители помогут НЛА достичь необходимой скорости.
Когда аппарат выйдет на поверхность воды и реактивный двигатель начнет работать, ускорители будут несколько секунд поддерживать определенную скорость, чтобы обеспечить подъемную силу, пока реактивный двигатель не создаст тягу.
Корпус. В корпусе НЛА размещены компьютер, приборы и механизмы управления, антенны, датчики и т.д. У QFS-20 имеется автопилот, подключенный к искусственному интеллекту (ИИ). ИИ получает информацию от всех датчиков, сверяет её с заложенной программой рейса «туда и обратно» и мгновенно определяет, есть ли проблема в какой-либо части аппарата или системе, и сам решает, что нужно делать.

На рисунке показан воздухозаборник реактивного двигателя,а также двигатель подводного хода
Передняя кромка крыла имеет острый угол, чтобы минимизировать воздействие воды на поверхность во время входа. Без острого угла удар о поверхность вода мог бы повредить эту переднюю кромку, что создало бы серьёзную проблему.
Когда QFS-20 выходит из воды, его скорости недостаточно для создания нужной подъемной силы, возникает опасность сваливания. Поэтому предкрылок передней кромки опускается, чтобы аппарат смог создать достаточную подъемную силу и взлететь.
Когда разделенные рули направления заблокированы в нулевом положении, рысканье значительно уменьшается и поворот может быть недоступен. Поэтому курс для входа в воду следует устанавливать до снижения высоты и блокировать раздельный руль направления для входа в воду.
Первым коснется поверхности воды носовая часть аппарата. При ударе носа о поверхность воды он испытает сильный удар, скорость НЛА уменьшится, фактически произойдут несколько ударов на быстро уменьшающейся скорости. В итоге НЛА полностью войдет в воду.
Когда QFS-20 находится в положении входа в воду, расстояние от него до водной поверхности небольшое, поверхности управления находятся в опасности, предел положений элевонов составляет –30°+30°, а предел положений раздельных рулей направления составляет 0–60. Это предполагают, что рули направления с разделенным сопротивлением подвергаются большей опасности, поэтому их следует установить на 0 (нулевой) градус, чтобы не потерять их в момент входа в воду.
• • •
Процесс полета и подводного плавания включает 4 акта: полет, вход в воду, подводное путешествие, выход из воды.
Полет — начало и конец процесса, он начинается со взлёта и заканчивается снижением скорости и высоты для входа в воду.
Вход в воду начинается со снижения высоты полёта и заканчивается полным входом аппарата в воду. Одной из важных особенностей QFS-20 является прямой вход в воду и выход из нее (полет-ныряние — как у птиц), без посадки на поверхность воды с последующим погружением (полет-посадка-погружение-плавание).
При приближении к поверхности воды аппарат снижает скорость до скорости сваливания и запускает водометы.
Подводное плавание включает в себя все манёвры под водой, а водометы создают тягу для перемещения. Продолжительность пребывания под водой зависит от ряда факторов: цели, глубины плавания, количества топлива, предельной величины давления, на которое рассчитан корпус аппарата.
При выходе из воды аппарат выходит напрямую вместо того, чтобы сначала всплыть на поверхность воды, затем разогнаться и взлететь (последовательность «вода-поверхность воды-разгон-полёт»). Выход начинается со всплытия для преодоления короткого расстояния до поверхности воды, водометы работают на максимальной мощности при поддержке ускорителей взлета. При достижении необходимой скорости для выхода из воды передний предкрылок опускается вниз.
После выхода крышка входного отверстия для воды закроется и начнет работать реактивный двигатель.
«Концептуальный проект» предусматривал два варианта реализации: а) создание крупного беспилотника; б) создание пилотируемой машины. Несмотря на это, бионический проект Сиддала и Ковача поначалу не вызвал особого интереса на флотах. Его использовали только производители пластиковых моделей для склейки в домашних условиях.