

С неба - под воду - 6
- Опубликовано: 09.02.2025, 19:38
- Просмотров: 1122
Содержание материала
Глава 4
ИНЖЕНЕРНЫЕ ПРОБЛЕМЫ
Подводные лодки летать не могут, зато гидросамолеты могут, в принципе, погружаться. Следовательно, правильная постановка вопроса такова: требуется создать ныряющий гидросамолет, а не летающую подводную лодку. Однако то обстоятельство, что вода в 775 раз плотнее воздуха, создаёт массу трудностей для конструкторов.
Вель самолет должен быть, по возможности, как можно более лёгким, чтобы свести до минимума мощность двигателей, необходимую ему для взлёта, полёта и посадки. А подводной лодке требуется очень прочный корпус (соответственно — тяжелый), способный противостоять сокрушительному давлению воды.
Самолеты летают в воздухе, используя подъёмную силу крыльев, возникающую при движении с достаточной скоростью. Подводные лодки содержат внутри себя воздух, а также забортную воду в балластных цистернах: изменяя соотношение объёмов того и другого они погружаются или всплывают.
Таким образом, при проектировании любого ныряющего летательного аппарата (НЛА) конструкторам приходится иметь дело с противоречащими друг другу требованиями аэродинамики и гидродинамики.
(1) Наибольшая техническая проблема — масса НЛА. В соответствии с законом Архимеда, для пребывания под водой на определенной глубине масса вытесняемой им воды должна быть равна массе самого аппарата. Это противоречит идее полёта в воздухе, согласно которой аппарат должен быть как можно легче. Чтобы самолёт мог находиться под водой, он должен увеличить свой вес примерно в 4 раза. Для этого есть два основных способа:
• В фюзеляже и крыльях разместить специальные ёмкости для водяного балласта (до 30 % объёма этих конструкций), чтобы самолёт погрузился, заполнив ёмкости забортной водой;
• Заполнить водой внутреннее пространство самолета, кроме кабины пилотов, двигателей, топливных баков, аккумуляторов, отсека для полезного груза.
Второй способ дает определенную экономию веса машины и мощности двигателя по сравнению с первым способом. Но в том и другом случае нужны хорошо продуманные конструкции систем затопления и продувки, а также системы перекачки топлива между баками для поддержания продольной и поперечной остойчивости в полёте и под водой.
(2) Давление воды и прочность машины. Трудноразрешимой проблемой является сопротивление конструкции самолета давлению воды при погружении. Каждые 10 метров глубины увеличивают давление воды на 1 атмосферу (с поправкой на давление воздушного столба к итогу добавляется цифра 1).
Так, на глубине 25 метров давление составляет 2,5 атмосферы (с поправкой — 3,5), на глубине 50 метров уже 5 атмосфер (с поправкой — 6).
Такого давления не выдержит ни один обычный самолёт. Чтобы противодействовать давлению забортной воды, необходимо значительно увеличить общую, а не только аэродинамическую прочность самолета, следовательно — и его массу. Вот почему НЛА в принципе не способен погружаться на значительную глубину. Теоретически, она ограничена 20–23 метрами, но в имеющихся проектах не превышает 8–10 метров.
Дело в том, что в воде внутреннее пространство НЛА, заполненное воздухом, сопротивляется внешнему давлению забортной воды. Уменьшить разницу между их значениями можно лишь одним способом — погрузив машину ненамного ниже поверхности моря. Это существенно снижает наружное давление, а сам аппарат можно в таком случае сделать достаточно легким для взлёта. Кроме того, в процессе проектирования необходимо точно рассчитать соотношение динамических нагрузок в полёте и в подводном плавании.
(3) Выбор формы НЛА. Необходимо найти форму (в трех плоскостях) фюзеляжа, крыльев, оперения, двигателей, оптимальную и в плане аэродинамики, и в плане гидродинамики (обычная самолётная, треугольное крыло, «утка», центроплан, низкоплан, высокоплан). Гидросамолёты в подавляющем большинстве случаев высокопланы, чтобы свести до минимума контакт крыла с водой, защитить от воды воздухозаборники двигателей и сами двигатели.
А для погружения лучше низкоплан, чтобы крыло сразу входило в воду и способствовало погружению своей отрицательной плавучестью. Кроме того, НЛА должен хорошо летать, а в воде легко маневрировать. Тут возможны самые разные варианты решений. Например, одно крыло с изменяемой геометрией (по профилю, контуру, площади). Главное условие для решения проблемы крыла, фюзеляжа, оперения — достижение одного и того же значения числа Рейнольдса на очень разных скоростях: в воздухе от 185 до 740 км/час, в воде от 9,25 до 22,2 км/час (5–12 узлов)*.
* Число Рейнольдса (Re) есть мера отношения cил инерции к силам вязкости. Плотность в числителе выражения характеризует инерцию частиц, претерпевающих ускорение, а величина вязкости в знаменателе характеризует способность жидкости или газа препятствовать такому ускорению
(4) Двигатели. Полет в воздухе и подводное плавание — в смысле особенностей работы двигателей — тоже принципиально разные процессы. Поэтому конструкторам приходится делать выбор: либо они используют раздельные двигатели для движения в воздухе и в воде, либо создают комбинированную двигательную установку для работы в воздухе и в воде. Если НЛА должен взлетать не с поверхности воды, а прямо из глубины, требуются очень мощные двигатели, причём двухсредовые.
Для турбовинтового двигателя это невозможно при любой прочности материалов, а для реактивного требуется совмещать гидрореагирующее топливо с обычным авиационным керосином. И при этом надо вдобавок решить проблему начального обеспечения такого двигателя воздухом на взлёте. Авиамоторы нуждаются в надежной гидроизоляции, чтобы сохранить способность к запуску после всплытия на поверхность воды.
Воздухозаборники и выхлопные трубы в любом случае необходимо размещать выше ватерлинии машины, находящейся на поверхности воды, и вне зоны брызг от корпуса и (или) гидролыж самолета, глиссирующего по воде.
Наконец, существует ещё одна проблема: очень непросто подобрать энергоёмкие и при этом лёгкие аккумуляторы, а также мощный, но легкий электромотор для эффективного перемещения самолета под водой.
(5) Водонепроницаемость. Кабина пилотов, отсек для пассажиров или полезного груза, приборы управления, ориентации и связи, двигатели, топливо (или топливные элементы), аккумуляторы, электромотор должны быть надежно защищены от проникновения воды и от её давления извне. Правда, пилоты и пассажиры могут находиться и в «мокрой кабине», если используют кислородные либо воздушные дыхательные приборы, а также гидроизолирующие костюмы с электроподогревом.
Теоретически это возможно, но на практике сопряжено с множеством неудобств. Все средства управления, навигации и связи должны надежно работать в полете, в плавании по поверхности воды и под водой. Все конструкционные материалы должны быть защищены от коррозии и гальванического воздействия в водной среде.
(6) Проблема обитаемости. Имеется в виду оптимальное сочетание систем, созданных для самолетов и подводных лодок, с особым вниманием к конструкции кабины пилотов и (или) пассажирского салона, системы подачи и регенерации воздуха при подводном движении, к средствам аварийной эвакуации в полете и под водой.
АНАЛИЗ Ю. ХЭНДЛЕРА
Юджин Хэндлер (Eugene H. Handler), инженер по гидродинамике гидросамолетов, сотрудник Бюро вооружения флота США, в сентябре 1964 г. опубликовал статью в журнале «Записки военно-морского института США». Проанализировав в ней проекты НЛА, известные к 1964 г., он пришёл к выводу, что ТТХ подобного аппарата должны находиться в следующей «вилке»:
экипаж: 2 человека;
глубина погружения: минимум 8, максимум 20 м;
скорость под водой: от 3 до 7 узлов (5,5–13 км/ч);
автономность под водой: от 4 до 10 часов;
дальность плавания под водой: от 20 до 40 км;
скорость полёта: от 280 до 410 км/ч за 2–4 часа;
высота полёта над морем: 250–750 м;
дальность полёта: 300–800 км;
стартовый вес: от 12 до 15 тысяч фунтов (5,45–6,8 т);
полезная нагрузка: от 500 до 1500 фунтов (230–680 кг).
Каждая из указанных характеристик является минимальной и для самолета, и для подводной лодки. Но сочетание их в одном аппарате создаст выдающуюся машину.
Хэндлер заявил:
"Разработка работающего прототипа летающей подводной лодки задача сложная и трудоёмкая, но потенциальный результат разработки будет существенным и ценным. Следовательно, концепция такого аппарата требует тщательной инженерной экспертизы. При этом необходимо избегать крайностей — как чрезмерно оптимистических похвал со стороны некоторых энтузиастов, так и холодного отрицания твердолобых реалистов."
Безусловно, он был прав. Задача чрезвычайно сложная. Именно поэтому до сих пор никто не смог создать пилотируемый НЛА, удовлетворяющий всем изложенным здесь требованиям. Это касается и наиболее «продвинутых» проектов вроде «Aeroship » или «Petrel».
Неизвестно, как они повели бы себя на испытаниях. Ибо неоспорима старая мудрость: «гладко было на бумаге, да забыли про овраги»!
Глава 5
ПОПЫТКИ РЕАЛИЗАЦИИ ИДЕИ
Ныряющий самолет Рейда
Американец Дональд Рейд (Donald V. Reid; 1912–1991) спроектировал, и построил несколько действующих макетов самолета, способного летать в воздухе и двигаться под водой. Инженер-электрик по профессии, Д. Рейд работал на военноморской испытательной станции турбин в Западном Трентоне*.
* Западный Трентон (West Trenton) — пригород Трентона в штате Нью-Джерси.
А его внеслужебным увлечением было создание моделей самолетов и подводных лодок. Однажды вечером в 1956 г. он строил радиоуправляемую модель подводной лодки в своей мастерской, и вдруг крылья для макета самолета упали с полки на корпус этой лодки. И тут в голову Рейда вдруг пришла мысль: а что, если смастерить такой гидросамолет, который сможет погружаться в воду, плавать в глубине, потом всплывать на поверхность и взлетать в воздух?!
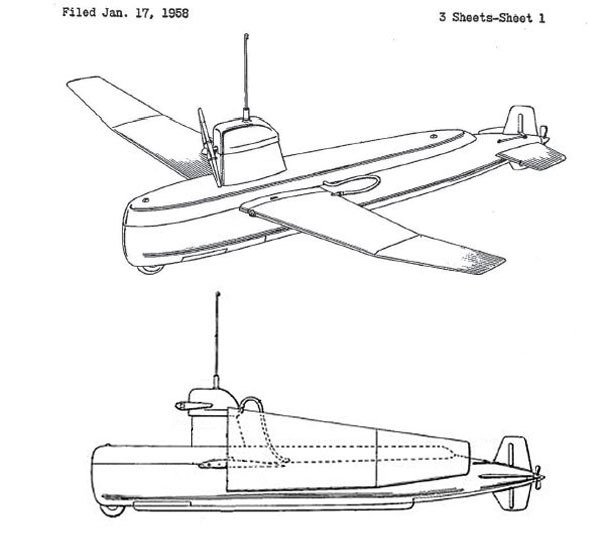
Рисунки из патента Д. Рейда. Реально построенная машина значительно отличалась от этих чертежей
Дон увлек своей идеей сына Брюса и дочь Кэрол. С их помощью он строил и испытывал все более крупные модели задуманного им аппарата. Оказалось, что это не просто. Ведь модель самолета должна быть максимально легкой, чтобы её мог поднимать в воздух миниатюрный бензиновый моторчик с пропеллером.
А модель подводной лодки должна быть достаточно прочной (следовательно, более тяжелой, чем модель самолета), чтобы в движении она не развалилась от сопротивления воды.
Добившись более или менее приемлемых результатов при испытании моделей, Д. Рейд 17 января 1958 г. подал патентную заявку на свой аппарат, который назвал «Летающей подводной лодкой» (Flying submarine). Неизвестно, кто и как изучал три листа чертежей и приложенное к ним описание, но факт остается фактом: патент был выдан только через пять с половиной лет — 4 июня 1963 года! За два года до получения патента, в 1961 г.,
Рейд построил радиоуправляемую демонстрационную модель летающей подводной лодки длиной 3 фута (91 см), с крылом размахом 3,5 фута (107 см). Она успешно летала, садилась на воду, погружалась и плыла на небольшой глубине. Модель имела микродвигатель внутреннего сгорания и радиоаппарат с антенной для дистанционного управления.
Бак с бензином играл роль балластной цистерны. Когда модель садилась на воду, рычажок с электромагнитным приводом по радиокоманде открывал клапан в баке и в него самотёком поступала вода, вытесняя наружу более легкий бензин. После подводного плавания насос, работающий от электромотора, питаемого батарейкой, выкачивал воду из бака и модель всплывала. Но остался нерешенным главный вопрос: как взлететь после всплытия, если весь бензин вытек?
К сожалению, на принципиальном уровне Рейд эту проблему так и не решил. В построенном им полноразмерном самолете пилот заливал бензин из канистры, которую ему подавали с лодки. Получив патент, Рейд построил поплавковый гидросамолет-моноплан длиной 23 фута (7,01 м) с крылом размахом 32 фута (9,75 м).
Основой для него послужили списанный легкомоторный колесный самолет и два фанерных поплавка, которые Рейд купил за 100 долларов. Четырехцилиндровый двигатель «Lycoming» мощностью 65 л.с. (48 кВт), установленный на пилоне, обеспечивал полет; электромотор мощностью в одну лошадиную силу (0,74 кВт) вращал гребной винт в хвосте. Пилот сидел в открытой кабине и для погружения ему требовался акваланг. Баки с горючим служили также балластными цистернами.
После посадки на воду остатки горючего откачивались в водоём, и насос закачивал в баки забортную воду. Кроме того, самотёком затапливался фюзеляж. Но перед началом погружения пилоту надо было снять пропеллер, а бензиновый мотор загерметизировать резиновым чехлом. Чехлом служил резиновый бензобак от бомбардировщика времен Второй мировой войны.
Местный аэроклуб зарегистрировал аппарат в качестве частного легкомоторного самолета № 1740. Его неофициальными названиями были RFS-1 (Reid’s flying submarine first) и «Commander-1».

RFS-1 движется по воде (пропеллер вращается)
Первая публичная демонстрация состоялась 9 июня 1964 г. Пилотируемый Брюсом Рейдом, сыном Дональда, RFS-1 сначала взлетел с воды и на высоте около 10 метров пролетел 77 футов (23,47 м) над рекой Шрусбери (Shrewsbury). Добитый списанный «движок» мог обеспечить только короткие «прыжки» над водой.
Д. Рейд в кабине своей ЛПЛ
После этого пилот подготовил самолет к погружению, погрузился в воду, плыл там несколько минут на глубине примерно 2,65 метра со скоростью 3,7 км/ч (2 узла), потом совершил поворот и всплыл. Проблема возникла, когда потребовалось снова превратить лодку в самолет. Брюс снял чехол с двигателя, прикрепил пропеллер, залил бензин в бак, включил мотор, но мокрый RFS-1 развил скорость всего-навсего 8,33 км/час (4,5 узла). Взлёт после всплытия не состоялся.

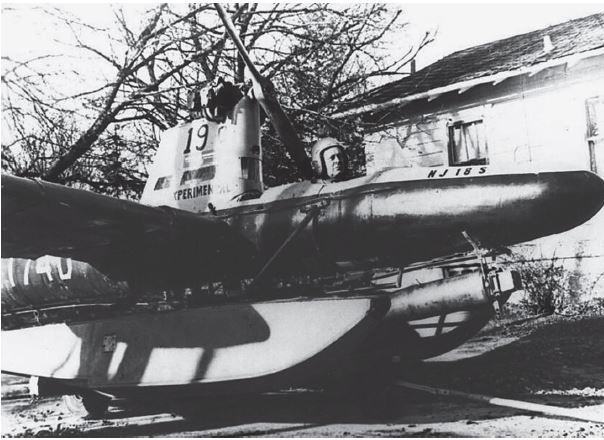
RFS-1 погружается в воду. Мотор снят, пилон закрыт чехлом
Тем не менее это был успех. Дональд Рейд убедительно доказал, что самолет способен превращаться в подводную лодку. В то время был разгар «холодной войны», все думали о новых видах оружия.

Брюс Рейд на крыле всплывшего самолета
Подводная лодка хороша для того, чтобы подкрасться к вражескому кораблю и взорвать его торпедой. Но такая подводная лодка, которая нанесет смертельный удар, а затем, подобно баклану, вынырнет из пучины и улетит, ещё лучше.
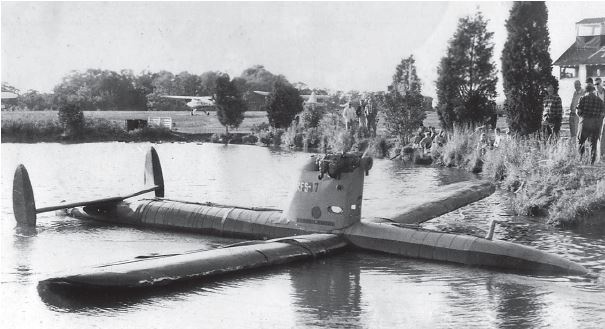
RFS-1 после всплытия
Вдохновляясь подобными мыслями, Д. Рейд надеялся, что теперь флот закажет ему летающую субмарину с мощными двигателями, насосами, аккумуляторами и всем прочим. Но хотя статья об RFS-1 в том же 1964 г. появилась в какомто научно-популярном журнале, флот обратился не к Рейду, а к профессиональным авиационным инженерам, работавшим в компаниях «Сonvair» и «Lockheed». Об этом — ниже.

RFS-1 на взлете (фото 1967 г.)
В 1968 г. Рейд построил большой макет двухместного RFS-2 с турбовентиляторным двигателем! На испытаниях он развил скорость 230 км/час. Скорость в подводном положении достигла 12 км/час (6,48 узла). Глубина погружения составила 3,5 м. Однако командование американского флота не проявило интереса и к этой модели.
Возможно, причина заключалась в том, что RFS-2 (Commander- 2) имел тот же недостаток, что и RFS-1: топливные баки служили также балластными цистернами.
Д. Рейд ещё долго пытался усовершенствовать свою ЛПЛ, но план разбогатеть на продаже чертежей военному флоту не оправдался. После смерти изобретателя его семья подарила RFS-1 Среднеатлантическому музею авиации (MidAtlanticAirMuseum) в г. Рединг (Reading), штат Пенсильвания. А в 2004 г. сын Брюс издал книгу «Летающая субмарина: история изобретения летающей субмарины Рейда RFS-1».