

С неба - под воду
- Опубликовано: 09.02.2025, 19:38
- Просмотров: 1120
Содержание материала
С НЕБА — ПОД ВОДУ
Ныряющие летательные аппараты
ПРЕДИСЛОВИЕ
Уже давно — с 1885 года — в научно-фантастической литературе фигурируют летательные аппараты, совмещающие в себе способность гидросамолета - совершать посадку на воду и взлетать с неё со способностью подводной лодки - плавать на опреде ленной глубине. Такие аппараты называют ныряющими гидросамолетами (diving seaplane) или летающими подводными лодками (flying submarine). Надо признать, что определение «ныряющий гидросамолет» является более точным, так как почти все конструкторы брали за основу именно самолет, а не подводную лодку. В ХХ веке некоторые инженеры-профессионалы, а также изобретатели-самоучки пытались объединить преимущества самолета и подводной лодки в одном техническом устройстве. Но оказалось, что из-за большой разницы между воздушной и водной средой это очень непростая задача. Поэтому не удивительно, что аэросубмарины чаще появлялись на страницах книг, чем в чертежах. Завершенных проектов известно немного, все они рассмотрены в предлагаемом исследовании. И все же проектирование такого аппарата является очень интересной инженернотехнической задачей. Поэтому время от времени к её решению обращаются все новые и новые специалисты. Однако в последние 20–25 лет произошла существенная трансформация первоначальной идеи ныряющего гидросамолета. Её суть — в переходе от аппаратов, управляемых экипажами, к беспилотникам с дистанционным либо автоматическим управлением. Изменился также способ старта. Беспилотные двухсредовые аппараты в основном предназначены для запуска с подводных лодок, находящихся в погруженном положении, с последующим возвращением этих аппаратов на борт носителя.
АББРЕВИАТУРЫ, ИСПОЛЬЗУЕМЫЕ В КНИГЕ
АПЛ— атомная подводная лодка
БЛА, БпЛА— беспилотный летательный аппарат
ВВП — аппарат вертикального взлета и посадки
ВМВ— Вторая мировая война
ВМС, ВМФ— военно-морские силы (флот)
ДВС— двигатель внутреннего сгорания
КБ— конструкторское бюро
ЛПЛ— летающая подводная лодка
НЛА— ныряющий летательный аппарат
ПЛ— подводная лодка
ПЛО— противолодочная оборона
ПМВ— Первая мировая война
РДП— (устройство для) работы двигателя под водой (нем. «schnorkel»)
РЛС— радиолокационная станция (радар)
СмПЛ— сверхмалая подводная лодка
ТТХ— тактико-технические характеристики
ЭУ— энергетическая установка
DARPA (Defense Advanced Research Projects Agency) — Агентство перспективных исследовательских проектов (в структуре Министерства обороны США)
Глава 1
БИОНИКА: МЕЖДУ НЕБОМ И ВОДОЙ
Бионика (от греческого слова «бион» — элемент биологической системы) — одно из направлений в науке. Бионика исследует особенности строения и жизнедеятельности различных организмов с целью получения новых возможностей для решения инженерно-технических задач. Отсюда вопрос: существуют ли в природе такие живые существа, которые способны не только летать в воздухе, но и плавать под водой? Да, существуют. Это ныряющие птицы и летучие рыбы.
НЕСКОЛЬКО НЫРЯЮЩИХ ПТИЦ
Зимородок (Kingfisher)
Эта маленькая птица погружается в воду на скорости до 40 км/час для ловли мелкой рыбы, креветок и даже головастиков. Правда, она ныряет всего лишь на 25–30 см. Известно более 100 различных видов зимородков, большинство которых обитают вблизи озер и рек.

Ныряющий зимородок рек
Скопа (Osprey)
Скопы питаются только рыбой, поэтому им нужны отличные навыки ныряния. Они живут по всему миру в устьях рек и на больших озерах.
Средний размах крыльев скопы 1,5 м. Ныряя с высоты не более 40 м, скопы ловят рыбу на глубине до 1 метра.
Олуша (Gannet)
Крупная морская птица, обитающая в Атлантическом и Тихом океанах. Она ловит рыбу, ныряя в воду с высоты около 30 метров и преследуя свою жертву под водой. Олуша развивает скорость до 100 км/ч к моменту вхождения в воду.

Олуша в момент ныряния
Это позволяет ей использовать кинетическую энергию, набранную во время пикирования, чтобы преодолевать природную плавучесть, обусловленную скоплением воздуха в оперении. А под кожей головы и груди имеются воздушные мешки, смягчающие удар о воду. Глаза олуши расположены спереди рядом с клювом, обеспечивая ей бинокулярное зрение, позволяющее точно оценивать расстояние в воздухе и в воде.

Олуша под водой
Морская утка (Sea Duck)
Длиннохвостую морскую утку летом можно встретить на побережьях в Арктике, зимой она гнездится южнее. Длина до 60 см, причем 20 % длины приходится на хвост.
Питается моллюсками (мидиями, креветками, крабами). Ныряет на глубину до 60 м. Использует крылья для передвижения под водой.
Баклан (Cormorant)
Для плавания на поверхности воды и в глубине, он использует большие перепончатые ноги и крылья, а длинной шеей проникает между камнями и расщелинами, где находит ракообразных, беспозвоночных и рыб. Бакланы задерживают дыхание на 2 минуты, что позволяет им нырять на глубину до 70 м.

Баклан погружается в воду
Пеликан (Pelican)
Обитает в Северной и Центральной Америке возле лагун и побережий. Эта птица ныряет в воду со скоростью до 64 км/ч. Чтобы избежать травм во время ныряния, пеликаны наклоняют голову и поворачивают тело. У них также есть воздушные мешки на груди, действующие как подушки при входе в воду. Они замечают добычу сверху и ныряют на огромной скорости, чтобы оглушить рыбу, а затем большим клювом подхватывают её.
Кайра (Guillemot, Murres)
Кайры живут в Арктике, на отвесных скалах. В период гнездования их колонии достигают нескольких десятков тысяч особей. У них небольшой размер (37–48 см) и вес (1–1,5 кг). Маленькие крылья не позволяют им взлетать с места, поэтому они прыгают с утеса или разгоняются по водной поверхности. Но, оказавшись в воздухе, развивают скорость до 120 км/ч (!) Нырнув, кайры пользуются крыльями как ластами, быстро и ловко преследуя рыбу. Они способны погружаться на глубину более 100 м.

Кайра под водой
Императорский пингвин (Penguin)
Императорские пингвины живут в Антарктиде тысячными колониями. Толстая шерсть служит им прекрасной изоляцией при нырянии. Эти пингвины не только самые крупные ныряющие птицы (вес до 45 кг), но и самые глубоководные: они ныряют на глубину до 550–560 м! Их тела благодаря толстым твердым костям выдерживают высокое давление воды. Пингвины проводят под водой в среднем 20 минут (!) в поисках криля, рыбы и кальмаров. Рекорд — 28 минут.
• • •
Этих восьми птиц вполне достаточно для того, чтобы понять: в мире природы птицы-ныряльщики не редкость. На самом деле их много. Они показывают людям, что идея летательного аппарата, способного нырнуть в воду на определенную глубину, выполнить там какое-то действие, потом всплыть, взлететь и вернуться в гнездо — вовсе не фантастика!
Летучие рыбы
Так называют семейство морских рыб «Exocoetidae», в котором 69 видов, сгруппированных в 7 родов: длиннокрылы, короткокрылы, двукрылы, ласточкокрылы, стрижехвосты, фодиаторы, прогнихты. Они живут в тропиках и субтропиках, где вода теплая. Длина тела от 15 до 40–50 см. Особенностью таких рыб являются необычно большие грудные плавники, позволяющие им осуществлять непродолжительный планирующий полет. В случае опасности они при помощи сильных ударов хвостом быстро выскакивают из воды и парят в воздухе.
Степень способности к полёту зависит от размера рыбы и количества плавников для полёта. Дальность полёта у видов с короткими грудными плавниками меньше, чем у видов с длинными плавниками. Виды, использующие для парения только грудные плавники, летают хуже видов, использующих для полёта ещё и брюшные плавники.

Взлет летучей рыбы
Рыбы могут изменять угол наклона плавников, влияя на направление полёта. Взлетев под углом 30–45 градусов к поверхности воды, с начальной скоростью, увеличивающейся от 30–35 до 80 км/ч, рыбы планируют по воздуху, постепенно снижаясь обратно к воде. Высота полёта достигает 5 м, дальность у мелких особей — до 50 м. Набирая скорость, рыба прижимает плавники-крылья к телу. Они раскрываются ещё до того, как хвост оторвется от воды — это способствует дополнительному толчку. Рыба начинает планировать на скорости до 265 метров в минуту. Летучие рыбы могут совершать серийные «перелеты». Во время каждого такого прыжка хвост уходит в воду. Если особь сильная и крупная, она может пролететь 100–180 м, а при серии прыжков общей длительностью 40 секунд — до 400 м!
• • •
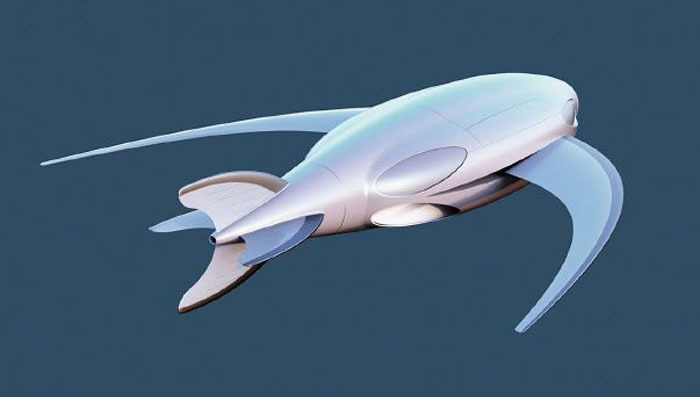
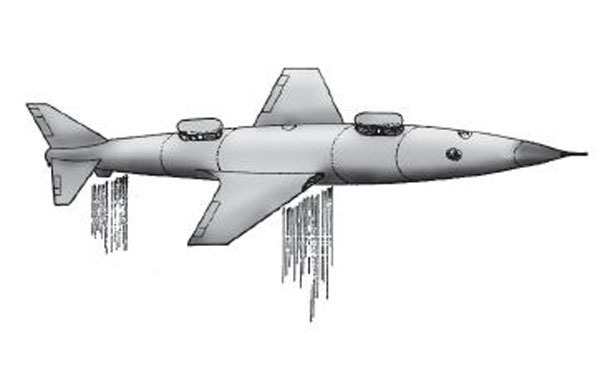
В воздухе летучие рыбы не могут состязаться с птицами. Но своими длинными прыжками-полётами над водой они показывают пример того, как можно избежать нападения хищника в подводном плавании. «Двигателем» у этих рыб является гибкий хвост. Совсем недавно, в конце 2023 г., группа молодых британских ученых и инженеров под названием «Future Nest», представила разработанный ею подводный дрон, способный — подобно летучей рыбе — выпрыгивать из воды и пролетать определенное расстояние для того, чтобы догнать ускользающую цель либо самому уклониться от вражеской атаки.

Подводно-воздушный дрон, созданный по принципу летучей рыбы
Такой дрон оснащен крыльями, раскрываемыми для полёта над водой, и реактивным двигателем с соплом в хвостовой части корпуса. Идею этого дрона выдвинула Али Рой (Ali Roy), системный инженер из компании «SAAB Sea Eye», являющейся «дочкой» шведского концерна SAAB. Именно она возглавила группу талантливой молодежи, разработавшей проект. Связь с бионикой в данном случае очевидна.
Дрон типа летучей рыбы с плавниками в передней части
Есть и другой вариант подражания природе. Рыбы семейства скатов, например манты и морские коты (хвостоколы), плавают, взмахивая внешними краями плавников. Виктор Крылов из британского университета в Лафборо (Loughborough University) считает, что ныряющие самолеты могут делать то же самое. Он предложил использовать электродвигатели и материалы с памятью формы, чтобы многократно взмахивать концами гибкого клиновидного крыла (либо хвостом), создавая волну, которая колеблется назад, создавая тягу вперед. Испытания моделей НЛА с волнообразными резиновыми крыльями (или хвостами), показали, что они надежно обеспечивают движение, хотя менее эффективно, чем обычный гребной винт. Зато такой «привод» намного тише гребного винта, а это затрудняет или делает невозможным обнаружение НЛА гидроакустическими приборами.
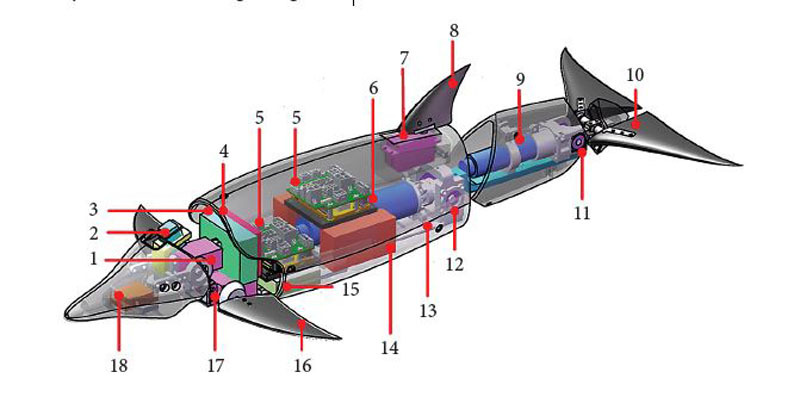
Подводный дрон, подобный дельфину
1) сервопривод шеи; 2) выключатель); 3) модуль; 4) панель управления; 5) платы сервоприводов; 6) двигатель постоянного тока; 7) сервопривод
спинного плавника; 8) спинной плавник; 9) двигатель постоянного тока; 10) хвостовой плавник; 11) хвостовое сочленение; 12) поясничное сочленение; 13) оболочка; 14) аккумулятор; 15) уравновешивающий груз; 16) плавник; 17) сервопривод плавника; 18) гироскоп
Глава 2
ПОЯВЛЕНИЕ ИДЕИ: ПРОРОЧЕСТВА ФАНТАСТОВ
Л. Жаколио (1885)
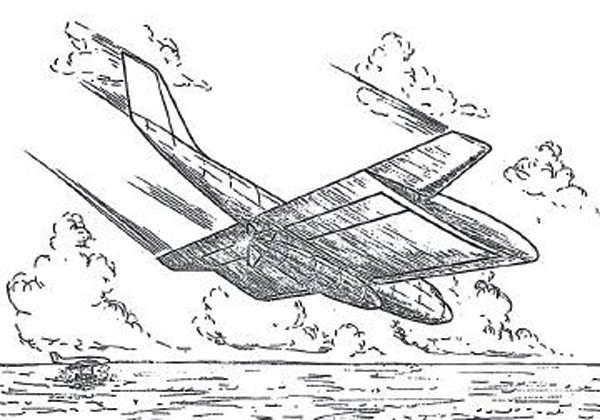
Французский писатель Луи Жаколио (Louis Jacolliot; 1837– 1890) самым первым высказал идею гибридного аппарата «воздух-поверхность воды-глубина» в 1885 г. в романе «Пожиратели огня» (Les Mangeurs de Feu). Он описал два таких аппарата, которым дал названия «Swan» (swan — лебедь по-английски, хотя на рисунках он больше похоже на пухлого птеродактиля) и «Remember» (Помни!). В центре сюжета этого романа приключений — любовная история молодого французского дипломата и русской княжны. События разворачиваются в России и Франции, США и Австралии*.
* Роман впервые вышел на русском языке в 1910 г. Затем в 1993 г. (перевод Е. Киселёва) и в 2012 г. (перевод С. Кондратенко). В издании 2012 г. воспроизведены все 108 иллюстраций французского художника А. Пэри.

ЛПЛ «Лебедь» (Swan)
Влюбленная пара, сама того не зная, нарушила планы таинственного Общества Невидимых, приговорившего их к разлуке и смерти. Герои романа сталкиваются с кровожадными племенами туземцев, не боящихся огня, с бандами белых преступников, американскими авантюристами, продажными местными властями. Но отважные молодые люди вступают в борьбу и при помощи чудесных машин побеждают всех своих врагов. Г. Коллинвуд (1886) В 1886 г. в Лондоне вышла в свет книга «Судовой журнал Летучей рыбы» (The Log of the Flying Fish) англичанина Гарри Коллинвуда (Harry Collingwood). На самом деле имя/фамилия автора этой приключенческой повести Уильям Джозеф Ланкастер (1843–1922). Он был инженером-строителем, а также писателем, сочинившим более 40 книг для подростков. Книга посвящена «Летучей рыбе», фантастическому гибриду дирижабля и подводной лодки, который не только летает в небе, но и плавает в глубинах морей. В первом издании книги было 376 страниц, в том числе 12 рисунков художника Гордона Брауна. Сюжет, вкратце, таков. Немец-профессор Генрих фон Шелкенберг на деньги английского баронета Реджинальда Элфинстона строит из созданного им металлического сплава «эфириум» уникальный воздушный корабль, способный не только летать, но также плавать по воде и под водой. К этим двоим присоединяются бывший полковник инженерных войск Сирил Летбридж и лейтенант военного-морского флота Эдвард Милдмей. Все четверо отправляются в путешествие на «Летучей рыбе».
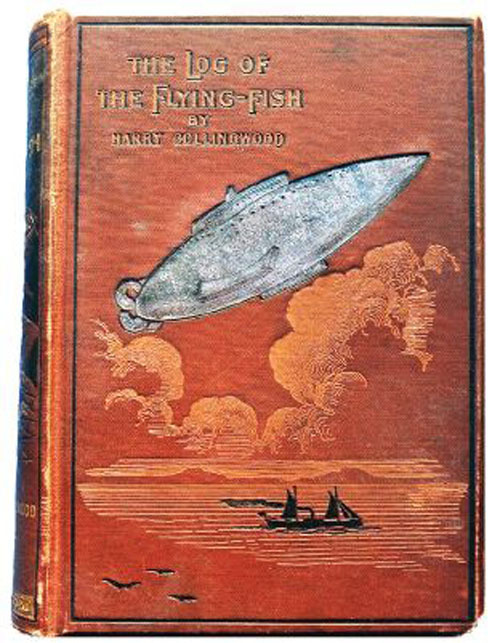
Первое издание книги Г. Коллинвуда (1886 г.)
Отважная четверка посещает Арктику и Северный полюс, горы Гималаи (в том числе вершину Эверест), тропики Центральной Африки, где находит руины легендарной страны Офир царя Соломона. А кроме того, исследует на дне моря затонувшие корабли. В 1907 г. эта книга вышла под другим названием — «Дирижабль — подводная лодка» (Dirigible — Submarine Boat)*.
* В 2017 г. повесть впервые появилась в переводе на русский язык в издательстве В. В. Мамонова под названием «Судовой журнал Летучей рыбы». Издатель дополнил основной текст статьёй Г. Ульмана «Летучая рыба как средство транспорта. Гарри Коллинвуд на Эвересте, в Африке, далее везде».
П. Маэль (1902)
Художник Букар (Bouquart), иллюстрируя в 1902 г. для французского издательства «Ollendorf» повесть П. Маэля (P. Maël) «Подводная лодка Мститель» (Le Sousmarin Le Vengeur), представил её похожей на сказочного дракона, а не техническое устройство. Невольно в голову приходит мысль о том, что месье Букар вдохновлялся кошмарными образами художника Иеронима Босха, жившего во второй половине XV века и в начале XVI.

ЛПЛ «Мститель» (Le Vengeur) (1902). Худ. Букар, автор П. Маэль (P. Maël)
Кстати говоря, П. Маэль — это коллективный псевдоним двух соавторов — Шарля Винсена (Charles Vincent; 1851– 1920) и Шарля Косса (Сharles Causse; 1862–1904), сочинивших несколько десятков авантюрных и любовных историй.
Ж. Верн (1904)
В 1904 г. вышел в свет очередной научно-фантастический роман знаменитого французского писателя Жюля Верна (1828– 1905) «Властелин мира» (Maître du monde).
В книге рассказывается о том, что на дорогах США был замечен таинственный автомобиль, который мчался вдвое быстрее любой гоночной машины. В море у берегов Америки видели небольшой корабль обтекаемой формы, плывущий без парусов, без дымовой трубы и на большой скорости уходящий от любой преследователя. В озере, изолированном от моря, вдруг всплыла подводная лодка. Оказывается, и автомобиль, и катер, и подводная лодка, и аэроплан — всё это новый аппарат изобретателя Робура (Robour), о котором Ж. Верн уже рассказывал в романе «Робур-завоеватель», изданном в 1897 г. Аппарат способен передвигаться по дорогам как автомобиль, по воде как катер, под водой как подводная лодка, по воздуху как аэроплан*.
* Название аппарата — «Terrible». Это слово означает во французском и английском языках «Грозный», «Страшный», «Ужасный». Вариант перевода зависит от контекста.
Универсальная машина Робура
Художник Ру (Rou), рисовавший иллюстрации к роману, консультировался с писателем. В результате он изобразил узкий металлический корпус длиной 10 метров в форме веретена, который в носовой части заострён сильнее чем в корме. Снизу к корпусу на поперечных осях прикреплены четыре колеса диметром 60 см, со спицами и толстыми шинами. Утолщенные спицы своей формой похожи на лопатки. Сверху в корпусе устроены три люка, палуба имеет ограждение в виде стоек с леерами. В носовой части корпуса видна головка выдвижного перископа. По бокам аппарата находятся складные крылья. Обычно они прижаты к бортам и расправляются лишь для полета. С обеих сторон киля прикреплены паровые турбины конструкции Чарльза Парсонса*.
* Парсонс построил свою первую турбину в 1884 г.

Аппарат Робура всплыл с глубины.
Надо отметить, что использовав «турбины Пирсона» для движения, Верн предсказал создание турбореактивного авиационного двигателя, а также возможность взлёта летательного аппарата если не вертикально, то, после очень короткого разбега, благодаря машущим крыльям!
П. Вестерман (1912)
Следующим высказал идею летающей подводной лодки (ЛПЛ) в 1912 г. английский писатель Перси Ф. Вестерман (Percy Francis Westerman; 1876–1959) в научно-фантастической повести для юношества «The Flying Submarine». Повесть рассказывает о загадочном человеке из неназванной страны в Южной Америке. Он изобретатель, открывший новый вид газа, который назвал «гелием», и который намного легче «настоящего» гелия или водорода. Этот изобретатель использовал гелий во многих изобретениях, в том числе в рюкзаках, которые помогали человеку парить в воздухе или подниматься на вершины гор, а также в замечательной подводной лодке, которая, при использовании достаточного количества гелия, могла летать!
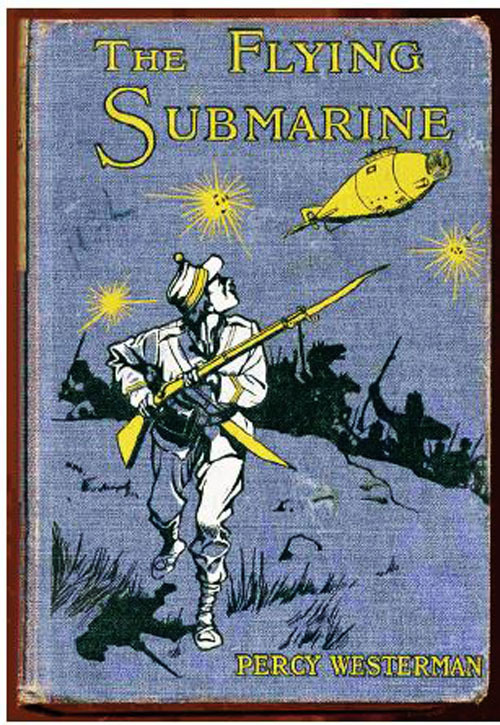
По замыслу автора, летающая машина представляет собой нечто среднее между управляемым аэростатом (дирижаблем) и подводной лодкой! У неё нет ни машущих крыльев, ни паровых турбин. Только хвостовое оперение, судя по рисункам в книге, оснащено вертикальными вентиляторами, опередившими британский экспериментальный самолет вертикального взлёта «Ryan» VZ-5 (1961 г.) на пятьдесят лет. Впрочем, Вестерман, в отличие от Жюль Верна, не увлекался описанием устройства выдуманных машин. Да и саму идею ЛПЛ Вестерман, по всей вероятности, заимствовал из книг о Робуре. По ходу повествования изобретатель использовал летающую подводную лодку для того, чтобы защитить свою страну от воинственного соседа.
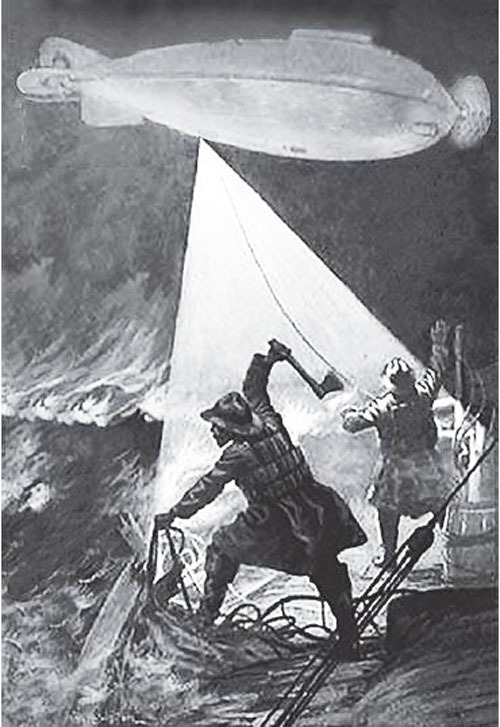
Рисунок к книге «Летающая подводная лодка»
Возможно, что южноамериканский конфликт в сочинении Вестермана отражает войну между Парагваем и Уругваем (декабрь 1864 — февраль 1870), вошедшую в историю своей крайней жестокостью. Впрочем, были в Южной Америке и другие войны. Например, Первая и Вторая Тихоокеанские (1864–1866 и 1879–1883 гг.).
• • •
После Первой мировой войны время от времени появлялись новые сочинения, в которых фигурировали ныряющие летательные аппараты или летающие подводные лодки.
Например, во Франции в 1924 или 1925 году под псевдонимом А. Родье (А. Rodiet) была издана книга некоего Антуана Тейдора (Antoine Teidor) «Воскресший остров» (L’Ile Ressuscitée). На обложке первого издания книги мы видим вылетающую из воды огромную машину с пятью большими колесами, на которые надета гусеница, и с прямоугольными крыльями. В верхней части корпуса машины устроена рубка с перископом и иллюминаторами.
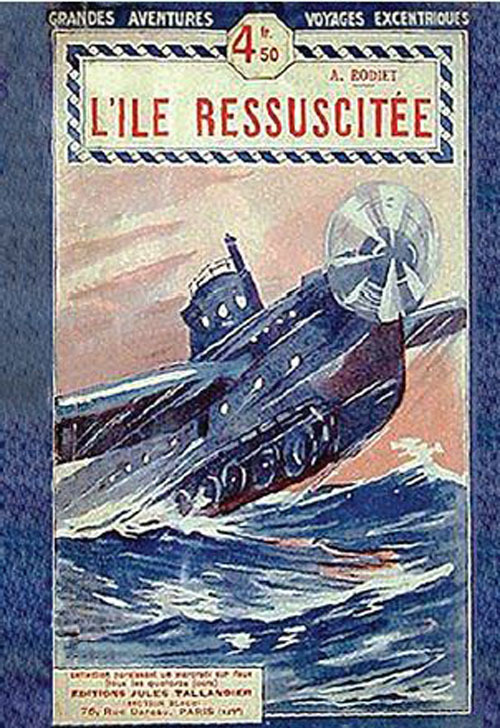
«Воскресший остров»
Иллюминаторы имеются и в борту. Всё это впечатляет, но любой современный читатель усомнится в том, что для взлета такого гиганта достаточно всего лишь одного мотора. В книге «Таинственная пещера» (La Grotte Mystérieuse), которую иллюстрировал художник А. Робида (A. Robida), представлен аппарат другого типа, который по сравнению с предыдущим кажется почти способным к полёту. Аппарат называется «Гегидроптер» (Gehydroptère) и вооружен 37-мм пушкой, установленной в его передней части. Обратите внимание на то, что фюзеляж окрашен в «защитный» цвет. Несущий винт вертикального взлета явно маловат. Зато в книге действуют не одна, а несколько таких машин.
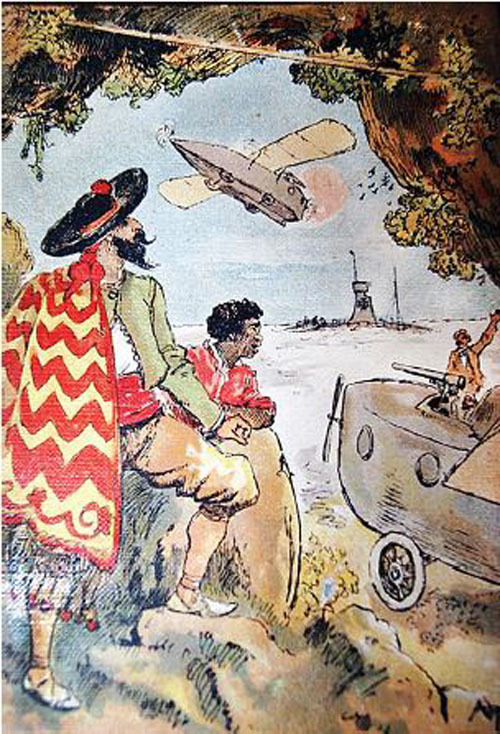
«Таинственная пещера»
Книга «Подводный самолет» (L’Avion Sous-Marin) доктора Родье, изданная в 1928 г., явилась своего рода римейком «Воскресшего острова» того же автора, который за время между изданием первой и второй книг успел получить диплом доктора (docteur Rodiet). Вдобавок, у него появился соавтор — Эмиль Лутц (Emile Lutz).
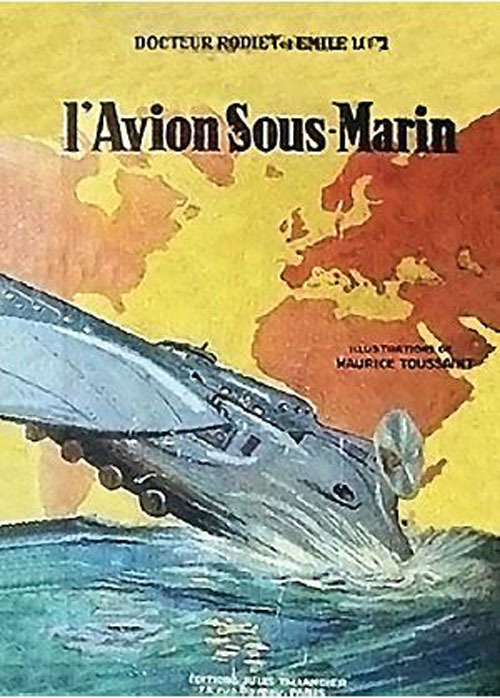
Доктор Родье и Эмиль Лутц. «Самолет подводная лодка»
Рубка с перископом на самолете исчезла, а колеса лишились гусениц. Но двигатель с пропеллером по-прежнему только один. На обложке книги Пьера д’Акилы (Pierre D’Aquila) * «Тайна Тихого океана» (Mystère du Pacifique), изданной в 1930 г., изображена летающая подводная лодка с названием британского лайнера, погибшего в апреле 1912 года — «Титаник».
* П. д’Акила — псевдоним Жана Эрнста (1897–1975).
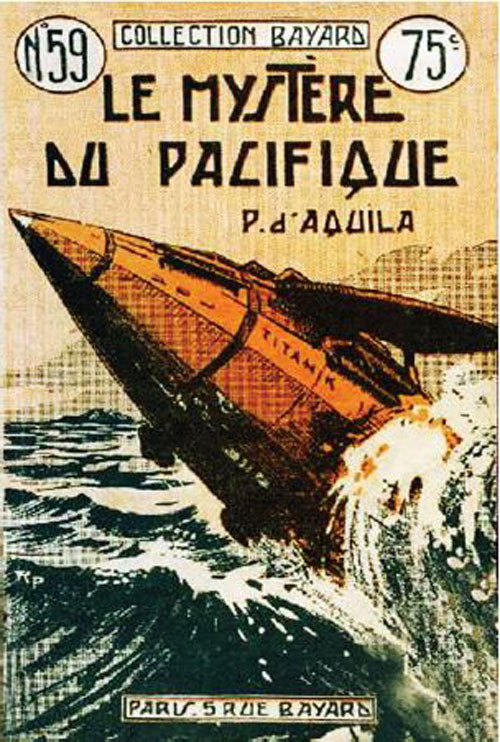
«Тайна Тихого океана»
• • •
После Второй мировой войны в публикациях любителей секретов и теорий заговоров вместо летающих подводных лодок появились «летающие тарелки» недобитых нацистов, якобы укрывшихся в подземных базах, расположенных в Антарктиде. Одной из последних версий летающей подводной лодки в литературе стала машина, о которой идет речь в книге «Операция "Подводный самолет"» (L’Operation Sous-Marin), которую написал в конце 1960-х годов популярный во Франции журналист-маринист Жан-Жак Антье (Jean Jacques Antier).
Детально рассматривать содержание всех этих книг, а также аналогичных сочинений других авторов во Франции, Англии, США, Германии нет смысла, потому что в период между двумя мировыми войнами уже появились первые проекты ныряющих самолетов — пусть ещё непригодные для реализации.
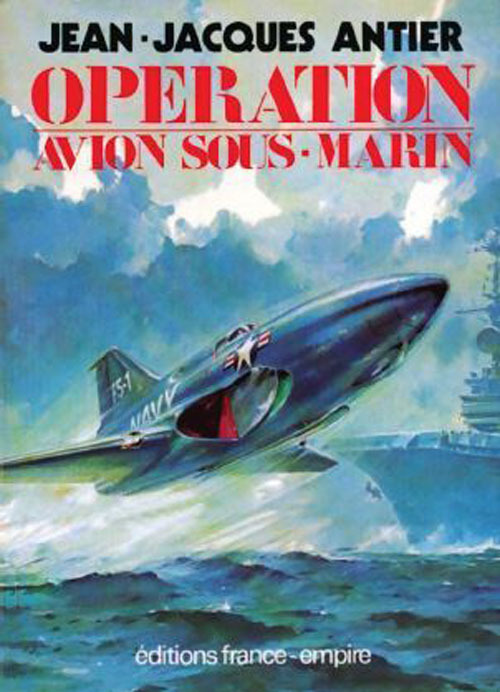
«Операция "Подводный самолет"»
Глава 3
НЕРЕАЛЬНЫЕ ПРОЕКТЫ
В декабре 1918 г. патентное бюро США выдало патенты на проекты двух летающих подводных лодок. Что интересно, авторами в обоих случаях были иммигранты, приехавшие в страну безграничных возможностей из Италии. Ф. Лонгобарди (1918) Феликс Лонгобарди (Felix Longobardi), 53-летний иммигрант, приехавший в Нью-Йорк в сентябре 1915 г., 3 декабря 1918 г. получил патент на своё изобретение. В нем вычерчена странная машина, сочетающая в себе четырехколёсный бронеавтомобиль, катер с тремя малокалиберными пушками и летательный аппарат. Источником энергии для двух электромоторов служат аккумуляторы. Экипаж — 5 человек.
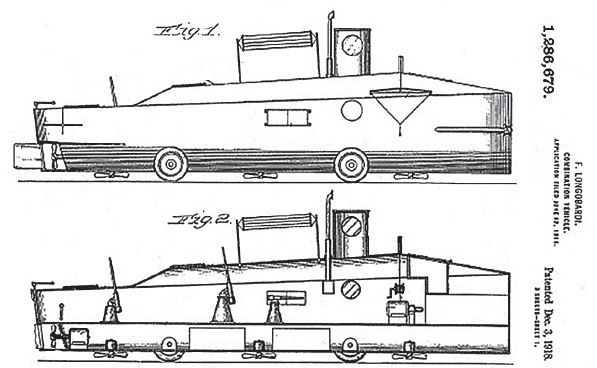
По оценке современных специалистов, машина Лонгобарди была абсолютно нереальной. Она могла бы летать только одним способом — падая с горы или с обрыва. Более того, она была слишком большой и тяжелой для того, чтобы нормально ездить и плавать по воде. О подводном плавании вообще не может быть речи, разве что кратчайшим путем на дно.
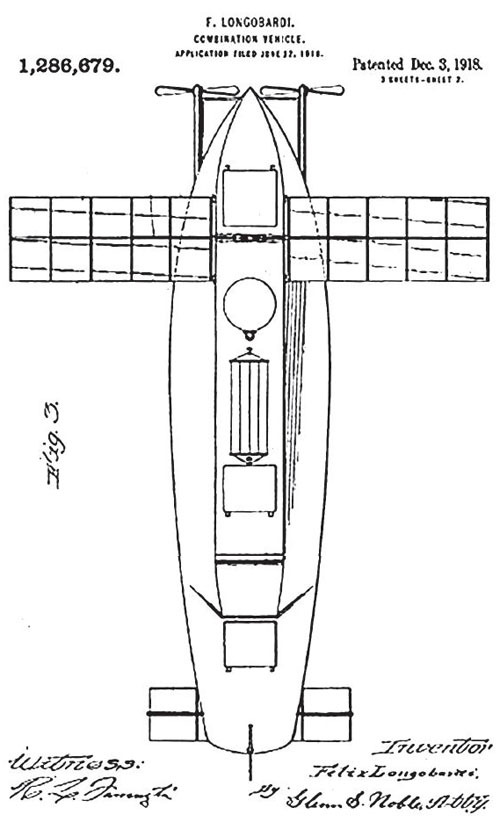
Но заслуга Лонгобарди в том, что он самым первым попытался спроектировать универсальную машину для передвижения по земле, по воде, под водой и в воздухе! Прям-таки последователь Жюля Верна в чистом виде!
П. Феррари (1918)
Ровно через три недели после Ф. Лонгобарди иммигранты-итальянцы Поломед Феррари и Энрико Мильёли (Polomede Ferrari & Enrico Miglioli) получили патент на гибрид гидросамолета и подводного судна (Combined hydroaeroplane and submergible craft. U.S. Patent 1,288,860. Patented Dec. 24, 1918). Из объяснительной записки в патентной заявке: Основной задачей изобретения является создание летательного аппарата по типу гидросамолета, приспособленного для перемещения на заданных высотах в воздухе, а также на поверхности воды, причем предусмотрено погружение [данного] устройства для перемещения под поверхностью воды.
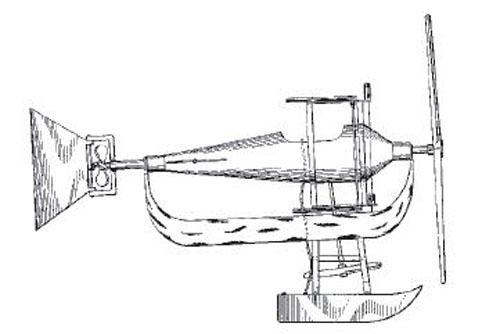
Аппарат Феррари и Миглиоли. Вид сбоку
Еще одной целью изобретения является совмещение в одной машине подводного судна и гидросамолета, с помощью которых можно было бы легко осуществлять путешествие под водой и по воде, а также по воздуху.
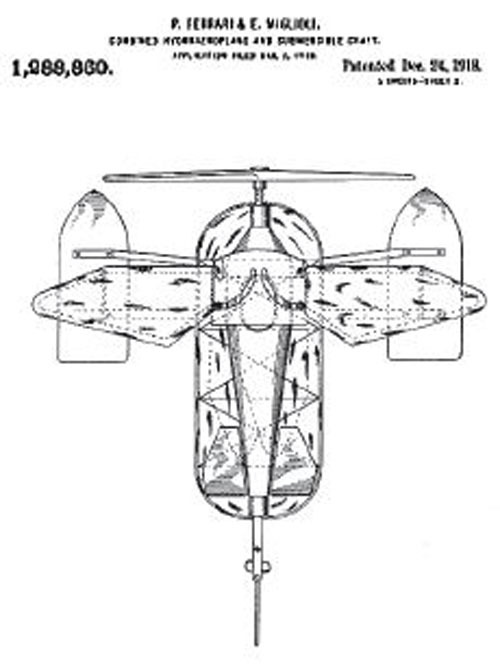
Аппарат Феррари и Миглиоли. Вид сверху
Устройство представляет собой гидросамолет, который в закрытом состоянии приспособлен для использования в качестве подводного судна. В общих чертах он состоит из аппарата, крылья которого складываются, средства [герметичного] закрытия кабины пилота и средства заполнения понтонов водой, когда аппарат предполагается использовать в качестве подводного. (Перевод мой — А.Т)
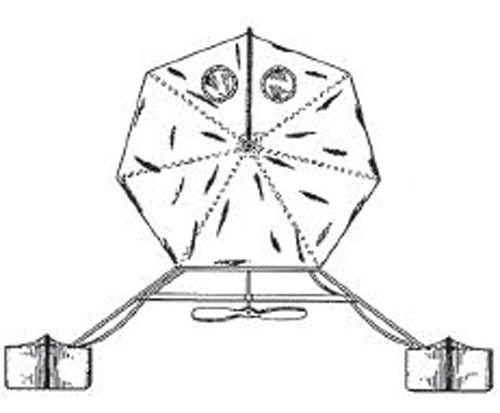
Аппарат Феррари и Миглиоли. Вид спереди
Неизвестный автор (1920)
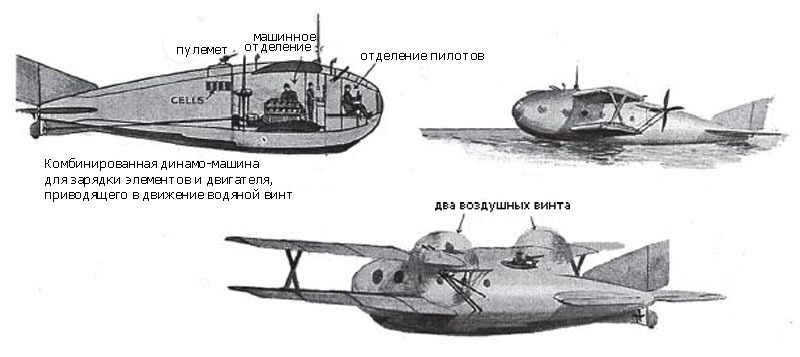
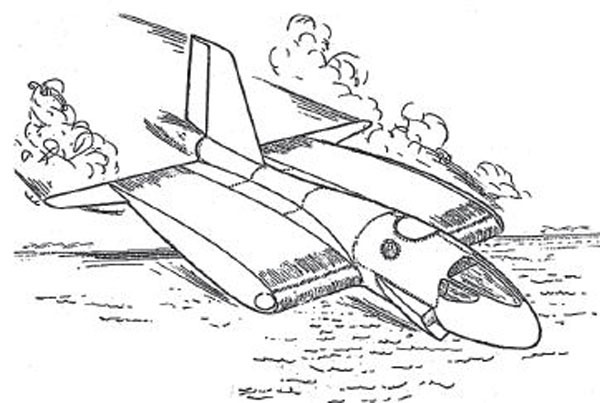
Британский еженедельник «The Illustrated London News» в выпуске от 24 января 1920 г. опубликовал статью «Tessauiran», в которой описан самолет, способный садиться на воду и на землю, летать в воздухе, плавать на поверхности воды и в её глубинах. Его конструкцию автор статьи показал на рисунках. Это металлический двухмоторный самолет-биплан с убирающимися крыльями и герметичным фюзеляжем. Фюзеляж и крылья выглядят «толстыми» и угловатыми, что явно мешало бы ему двигаться не только в воде, но и в воздухе.
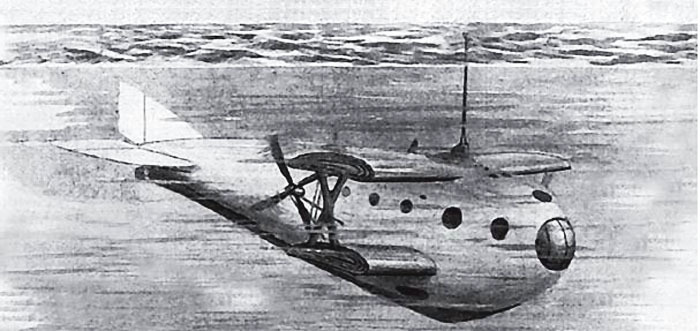
«Tessaurian» под водой
Прочная металлическая обшивка (необходимая, чтобы выдержать давление воды на глубине) добавляет лишнюю тяжесть аэроплану. Сомнительно, что он вообще смог бы оторваться от земли. Для движения под водой крылья складываются (точнее, на две трети втягиваются внутрь) для уменьшения сопротивления водной массы.
Плавать он, скорее всего, был способен, во всяком случае без проблем мог погрузиться. А вот мог ли он всплыть и взлететь с поверхности воды?! К сожалению, в интернете нет ничего, что могло бы пролить свет на эту концепцию 75-летней давности.
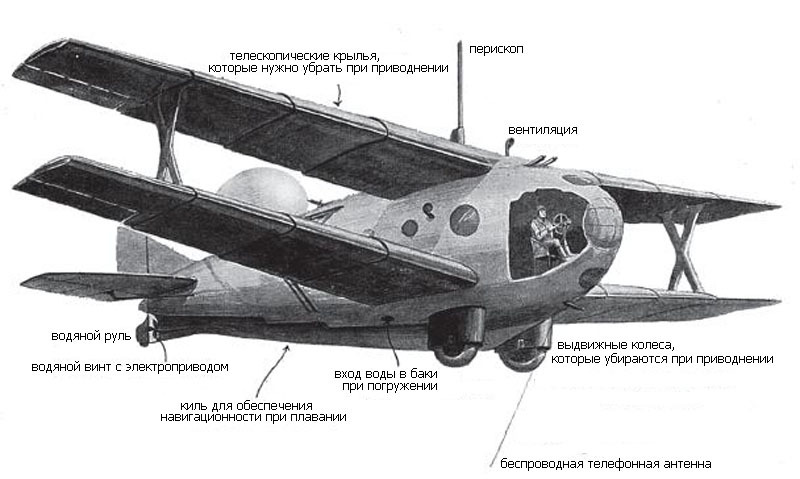
Cамолет-cубмарина «Tessaurian» с телескопическими крыльями и перископом
Что касается значения слова «Tessauiran», то оно связано с итальянским кондитерским изделием, а это наводит на мысль о шутке в стиле британского юмора. В том же 1920 году британский журнал «Flying» (Полёт) сообщил, что Первый лорд Адмиралтейства под впечатлением данной статьи обсудил «с одним из основных производителей самолетов» возможность создания ныряющего гидросамолета. Обменявшись мнениями, собеседники пришли к выводу, что «в настоящее время идея является совершенно фантастической».
Д. Ардо (1922)
Американец Джозеф Ардо (Joseph Ardo) из Ньюхолла (Newhall), в штате Вайоминг, 4 июля 1922 г. получил патент США № 1.491.369 на свой проект ныряющего гидросамолета-биплана. Этот патент ранее неизвестного изобретателя недавно обнаружили американские фанаты истории авиации. Патентные бюро — серьезные организации.
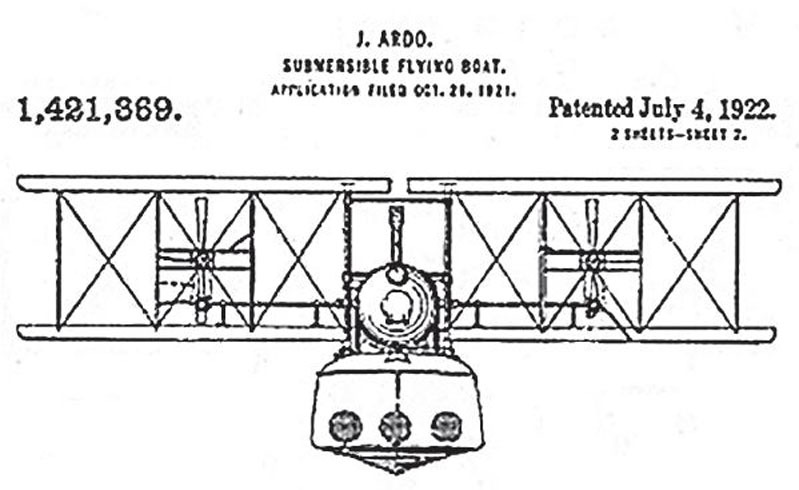
Рисунок из патента Д. Ардо: ныряющий гидросамолет — вид спереди
Поэтому нет сомнений в существовании проекта. Помещенные здесь рисунки скопированы с первой страницы патента. К сожалению, технические характеристики машины отсутствуют, как и сведения об изобретателе.
Ныряющий гидросамолет-биплан Д. Ардо
Неизвестный автор (1930)
В сентябре 1930 г. американский журнал «Modern Mechanics» опубликовал статью, в которой рассказал о проекте летающей подводной лодки, якобы предложенным каким-то изобретателем командованию датского военного флота. Автор статьи утверждал, что у этого самолета крылья частично втягиваются внутрь себя (по принципу складной подзорной трубы) — для снижения сопротивления воды в подводном по ложении. При этом их размах уменьшается в три раза. На рисунках показаны три положения аппарата: в полете, на поверхности воды и под ней.
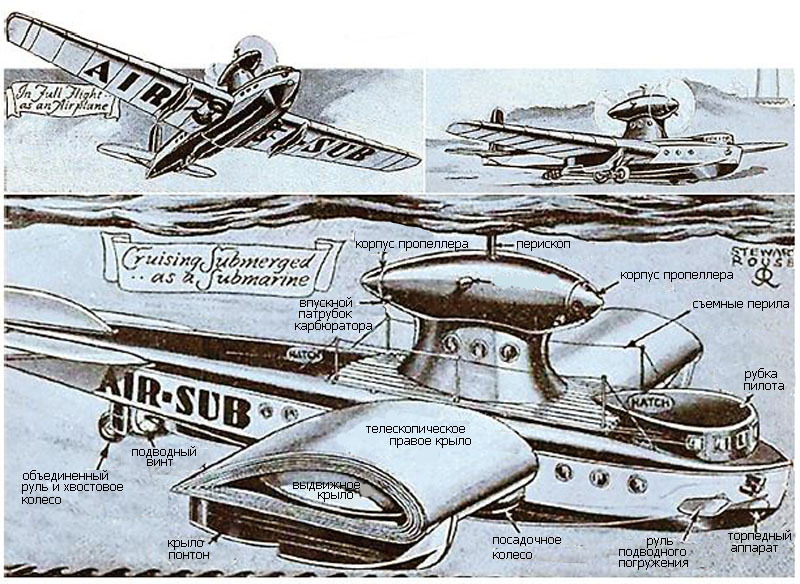
Так называемая «датская» ЛПЛ (1930 г.)
В статье рассказывается и о других интересных особенностях проекта, однако нет ни слова о том, кто спроектировал и построил такой аппарат, прошёл ли он испытания хотя бы в виде действующей модели. Рисунки к статье выполнил художник журнала. Ссылок на чертежи изобретателя нет. Возникает подозрение, что этот проект вообще не существовал. Скорее всего его выдумал автор статьи. А для большинства американских читателей в 1930-м году страна под названием Дания была чем-то вроде Шамбалы (по- английски ShangriLa): где-то очень далеко, или же вообще не существующая.
Б. Ушаков (1934–37)
В 1934 г. студент 2-го курса Морского инженерного института (МИИ) имени Ф.Э. Дзержинского в Ленинграде (ныне Военно-морской инженерный институт) Борис Ушаков предложил эскизный проект трехмоторного гидросамолета на двух поплавках, способного превращаться в подводную лодку. По замыслу изобретателя, в грядущей войне с империалистами гидросамолет будет высматривать с воздуха вражеские корабли.
Обнаружив подходящую цель и определив её курс, он выйдет из зоны видимости наблюдателей с корабля, сядет на воду, погрузится и при приближении корабля-цели атакует его торпедами. Ещё один способ применения — действия в районе баз и прибрежных фарватеров вражеских судов.
ЛПЛ должна в ночной темноте пролететь над минными полями, погрузиться и занять позицию для выжидания и атаки. По мнению Ушакова, три ЛПЛ могли перекрыть прибрежное судоходство в полосе длиной 15–16 км. Папка с чертежами и расчетами долго «ходила» между кафедрами института. На всякий случай ей даже присвоили гриф «секретно». Ушаков несколько раз переделывал проект, стараясь учесть критические замечания.
В апреле 1936 г. проект рассмотрела комиссия специалистов МИИ и признала достойным реализации в виде экспериментального прототипа. В июле того же года проект передали в Научно-исследовательский институт военного кораблестроения (НИИВК РККА). Его руководство поручило отделу «В» проверить представленные материалы. При проверке расчётов в них нашли ряд ошибок, после чего папку с бумагами вернули изобретателю.
В 1937 г. капитан 1-го ранга А. П. Сурин из Военно-морской академии (ВМА) представил положительное заключение на проект, с детальным обоснованием.
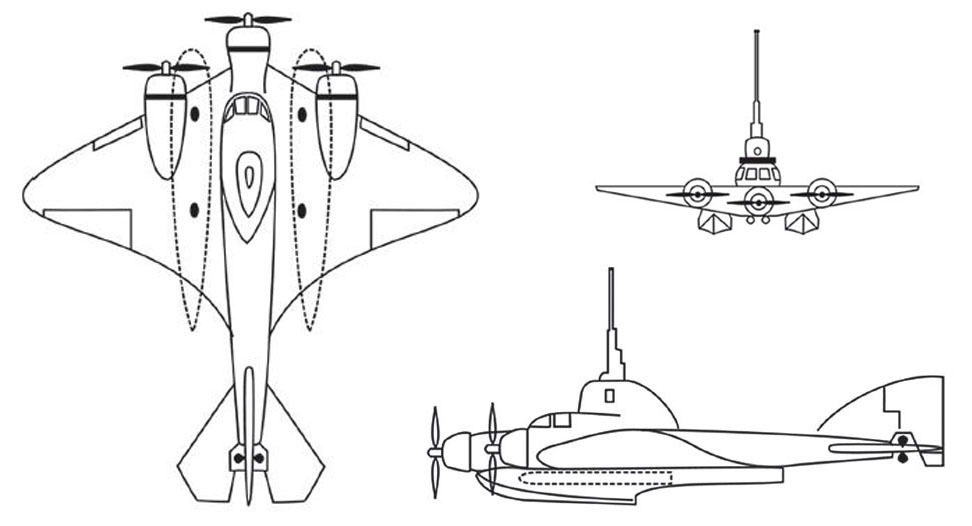
ЛПЛ в трех проекциях
После него свою резолюцию наложил начальник кафедры тактики боевых средств ВМА Леонид Гончаров. Он написал:
"Разработку проекта желательно продолжить, чтобы выявить реальность его осуществления".
Ушаков летом 1937 г. окончил МИИ, ему присвоили звание воентехника 1-го ранга и направили на службу в НИИВК. Здесь по его просьбе с проектом ознакомился начальник института Карл Григайтис и одобрил.
Проект включили в план работы отдела «В», куда определили Ушакова. Однако люди, работавшие здесь, хорошо разбирались в технике (в отличие от полуобразованного начальника НИИВК). Они понимали полную нереальность гибрида аэроплана и субмарины. Поэтому вскоре проект исключили из плана. Наконец, 10 января 1938 г. последний его вариант рассмотрели специалисты 2-го отдела НИИВК.
Рецензенты выразили сомнение в способности тяжелого самолета взлетать с воды, догонять уходящий корабль под водой, маневрировать для выхода в атаку. Кроме того, они отметили невозможность надежной герметизации «сухих отсеков» машины при погружении более чем на 5 метров.
На большей глубине заклёпки и уплотнители неизбежно начнут пропускать воду*.
* Предельная глубина погружения советских малых подводных лодок серий М-VIи М-VIбис, построенных в 1934–36 гг., составляла 50 метров, рабочая — 35. Так это подво- дные лодки с корпусами, имеющие каркас (набор) и обшивку из стали повышенной прочности. Самолету с тонким стальным каркасом, покрытым дюралюминиевой обшивкой, в смысле прочности до них очень далеко!
Но, соблюдая приличия, изобретателю предложили изготовить действующую модель и испытать её в опытовом бассейне. Больше о ЛПЛ никто не вспоминал. Ушаков много лет работал в кораблестроении, участвовал в 1950-е годы в проектировании военных кораблей на воздушной подушке.
• • •
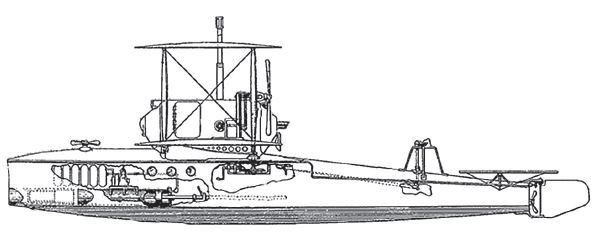
Итак, Б. П. Ушаков сконструировал цельнометаллический гидросамолет-моноплан, с тремя моторами и двумя поплавками, вооруженный двумя торпедами. Для погружения в воду ему надо было набрать воду в фюзеляж и крылья. А взлетать и садиться — как обычному гидросамолету. Фюзеляж имеет вид цилиндра диаметром 140 см, со стальным каркасом, обшитого дюралевыми листами толщиной 6 мм. Крылья и закрылки — стальные, поплавки — дюралюминиевые.
При погружении крылья, кабину пилотов и поплавки заполняет вода через специальные клапаны. В фюзеляже и крыльях устроены 6 герметичных отсеков: три для авиамоторов, для аккумуляторов, для гребного электромотора, и ещё рубка с перископом. Приборы управления полётом в кабине помещены в герметичный контейнер.
Рубка используется только для подводного плавания. Кабина пилотов при погружении заполняется водой, как и все негерметичные отсеки. Резиновые баки с горючим и смазочным маслом находятся в фюзеляже.
Погружение происходит в 4 этапа: 1) задраить отсеки авиамоторов; 2) отключить системы подачи топлива и масла; 3) задраить отсеки радиатора и аккумуляторной батареи; 4) экипажу перейти из пилотской кабины в герметичную рубку с перископом (выступающую вверх из фюзеляжа) и включить подводное управление. Откачку воды для всплытия производит насос с приводом от гребного электромотора.
Авиамоторы — АМ-34 конструкции А. А. Микулина, по 1000 л. с. каждый (при включении турбокомпрессора на взлёте мощность возрастает до 1200 л. с.)*.
* Метод работы А. А. Микулина заключался в копировании авиамоторов, купленных в Германии, Франции, США. Его АМ-34, это немецкий BMW-6, упрощённый для выпуска на устаревшем оборудовании рабочими низкой квалификации.

12-цилиндровый мотор АМ-34. Микулин сидит крайний справа
Для защиты от коррозии машина покрыта специальными лаками и красками. Скорость полёта с торпедами, по проекту, не более 185 км/ч, без торпед 200 км/ч. Экипаж 3 человека. Взлетный вес 15 тонн. Дальность полета 800 км. Потолок 2500 м. Допустимое волнение моря при взлете 4 балла по шкале Бофорта, при посадке 5 баллов. Мощность гребного электромотора 10 л.с. Проектная подводная скорость 2–2,5 узла (3,7–4,6 км/ч). Дальность хода — не более 5 миль (9,3 км). Глубина погружения — до 40 м. Максимальное время пребывания под водой — 48 часов. Время погружения 1,5 минуты, всплытия 2 минуты. Вооружение: 2 торпеды калибра 457 мм, подвешенные под фюзеляжем, и 2 авиационных пулемета калибра 7,62 мм. Длина торпеды образца 1936 г. для самолетной подвески — 570 см, вес 920 кг (в т.ч. 200 кг ВВ). На скорости 41 узел (75,9 км/ч) она проходила 3 км.
Был еще вариант торпеды АН: та же длина и вес, но заряд ВВ больше на 50 кг, а дальность — 4 км на 40 узлах. Боевая нагрузка (торпеды, пулеметы, патроны к ним, топливо для моторов) составляет 44,5 % взлетного веса самолёта (6,575 т). Это обычная величина для тяжёлых самолётов 1930-х годов.
• • •
Проект Ушакова изначально был непригодным к реализации. Непонятно, с какого «потолка» конструктор взял характеристики подводного хода для электромотора мощностью 10 «лошадей».
У немецкой сверхмалой подводной лодки типа «Hecht» (Щука), построенной в 1944 г. серией в 50 единиц, диаметр обтека- емого корпуса был всего лишь 0,96 м при длине 10,4 м, масса 11,83 тонн, а мощность электродвигателя 13 л.с. Имея диаметр корпуса на 44 см меньше, чем у ЛПЛ, без огромных крыльев и без «горба» в виде рубки, будучи легче её на 3,2 тонны, с мотором мощнее на 3 лошадиные силы, она за 15 часов проходила 45 морских миль (83,3 км) на скорости всего лишь 3 узла.
А тут махина с толстыми крыльями размахом 14 метров, у которой сверху большая рубка с нескладным перископом, снизу два огромных поплавка, спереди три большие гондолы авиамоторов с пропеллерами! И всего «одна лошадь» на каждые 1500 кг массы (у немецкой «Щуки» — на 910 кг).
Монстр Ушакова в подводном положении просто стоял бы на месте вследствие огромного лобового сопротивления воды! Воду из балластных цистерн на подводных лодках вытесняют воздухом высокого давления. Ушаков не учел, что один слабый электромотор выкачивал бы несколько тонн воды из крыльев и фюзеляжа через шланг не 2 минуты, а как минимум час, если не больше. В общем, этот проект, который в настоящее время во всех российских и зарубежных публикациях упоминают как «первый» и «хорошо разработанный», не был ни первым, ни реально осуществимым. А если бы дело дошло до постройки, то нет сомнений в том, что построив неработающую машину Ушаков разделил бы печальную судьбу Леонида Курчевского (1890–1937), Николая Дыренкова (1898–1937), Владимира Бекаури (1882–1938), Константина Калинина (1887–1938), Якова Таубина (1900–1941), сотен других изобретателей и конструкторов, объявленных «вредителями»*.
* На одном из интернет-форумов кто-то сообщил, что вскоре после Ушакова инженеры НИВК Кривов и Станкевич представили свой проект ЛПЛ. Но информации о нём нет. Существует и другая версия, согласно которой аналогичный проект был представлен намного позже, в начале 1950-х гг.
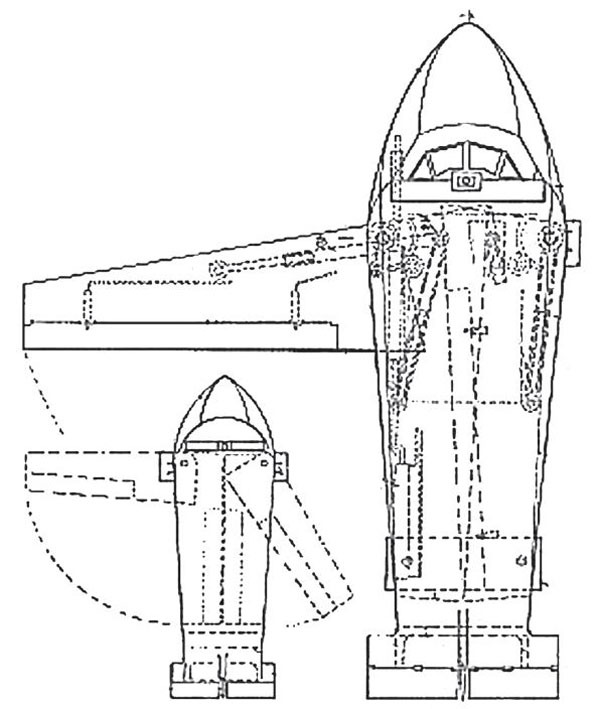
П. Де Асис (1939)
Немецкий авиационный календарь на 2014 год («Fliegerkalender2014») поместил статью, в которой упомянуты патенты, выданные в США в 1939 г. на два проекта НЛА.
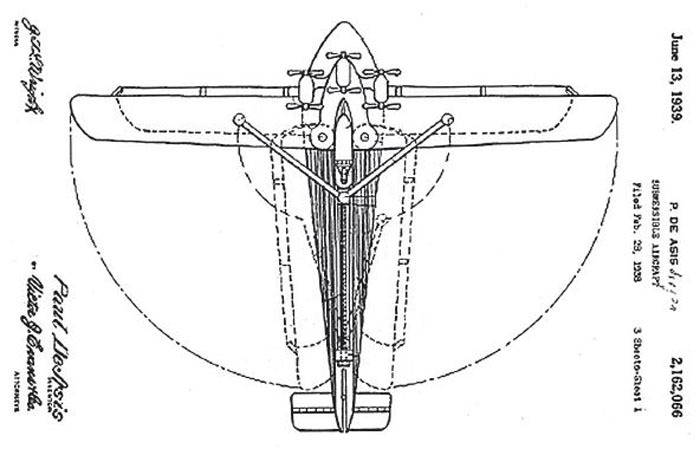
Автор одного — Пол Де Асис (Paul De Asis) из Нью-Йорка. В объяснительной записке к его патенту (U. S. patent 2,162,066) сказано, что суть изобретения такова: Гидросамолет с воздушными винтами и рулями направления, действующими [также] в воде. Включая устройства, действующие в воде для создания тяги и (или) замедления и (или) управления летательным аппаратом (например, пропеллеры, водомёты, рули направления).
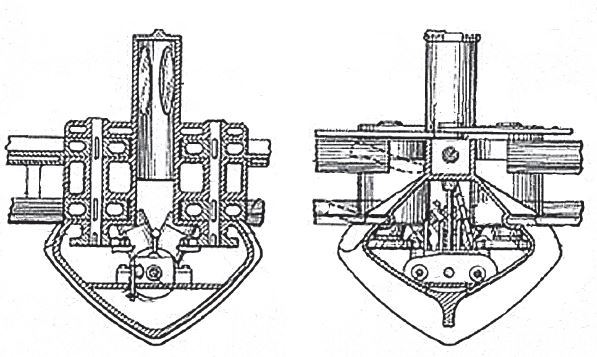
Поперечные разрезы машины П. де Асиса
Перед погружением пилот должен сложить оба крыла биплана назад, вдоль фюзеляжа. Площадь крыльев (на глаз) вполне достаточна для полёта.
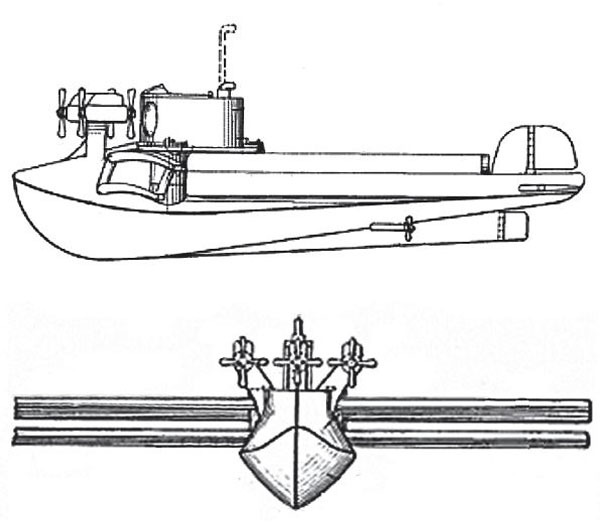
Э. Бригс и Г. Реддинг (1939)
В преамбуле патента Эрла Бригса (Earl Brigs) и Герберта Реддинга (Herbert C. Redding) объясняется, в чем состоит суть их изобретения: Настоящее изобретение относится к новым и полезным усовершенствованиям подводного летательного аппарата. Более конкретно, изобретение предлагает новый и улучшенный погружаемый летательный аппарат, который может перемещаться в воздухе, по поверхности воды, а также под водой. Новый усовершенствованный погружаемый «самолет» характеризуется тем, что он снабжен «крыльями», выдвигаемыми для полёта в воздухе и складывающимися в борта корпуса судна, подобного фюзеляжу [самолета], при движении с воздуха к поверхности воды и далее под воду. Для полёта предлагается новый верхний силовой привод с воздушными винтами.
Для движения по воде или под водой предлагается морской привод. При движении по воздуху и по поверхности воды предполагается использование двигателей внутреннего сгорания. Изобретение также предусматривает оснащение фюзеляжного корпуса погружаемого самолета многочисленными камерами и отсеками для размещения различных аппаратов и других предметов, обычно используемых в самолетах и подводных лодках.
Аппарат Э. Бригса. Вид сбоку
Предусмотрены камера подводного штурмана, камера управления воздушного пилота, а также камеры для вооружения и другого личного состава. Изобретение также предусматривает оснащение фюзеляжного корпуса погружаемого самолета многочисленными камерами и отсеками для размещения различных аппаратов и других предметов, обычно используемых в самолетах и подводных лодках. Предусмотрены камера подводного штурмана, камера управления воздушного пилота, а также камеры для вооружения и другого личного состава.
Для дальнейшего понимания изобретения, а также его задач и преимуществ необходимы прилагаемое описание и чертежи, а также формула изобретения, в которой более подробно изложены различные новации данного изобретения*.
*Cм. U.S. patent 2,444,332. (Перевод мой. — А.Т.)
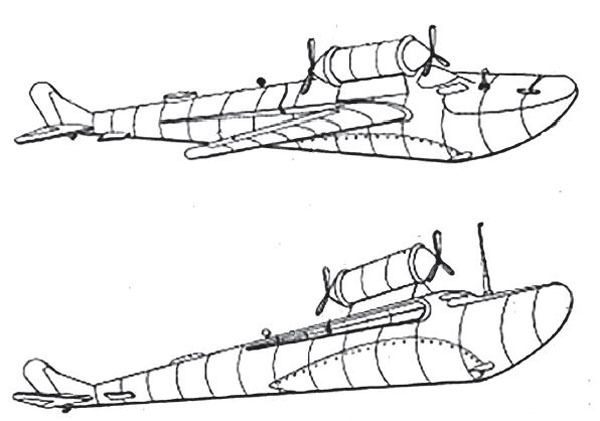
Аппарат Э. Бригса
Судя по чертежу, Бригс спроектировал сверхмалую подводную лодку, превратив её рули глубины в крылья. Способность данной машины к полету вызывает большие сомнения.
Х. Харрингтон
В апреле 1945 г. американский авиационный инженер Хьюстон Харрингтон (Houston Harrington) подал заявку на патент «Совмещение самолета и подводной лодки». Назначение своей машины он видел в том, что она способна совершать полет на малой высоте (тем самым избегая обнаружения радиолокаторами), в районе цели погружаться в воду, совершать торпедную атаку, затем всплывать, взлетать в воздух и возвращаться на базу как самолет.
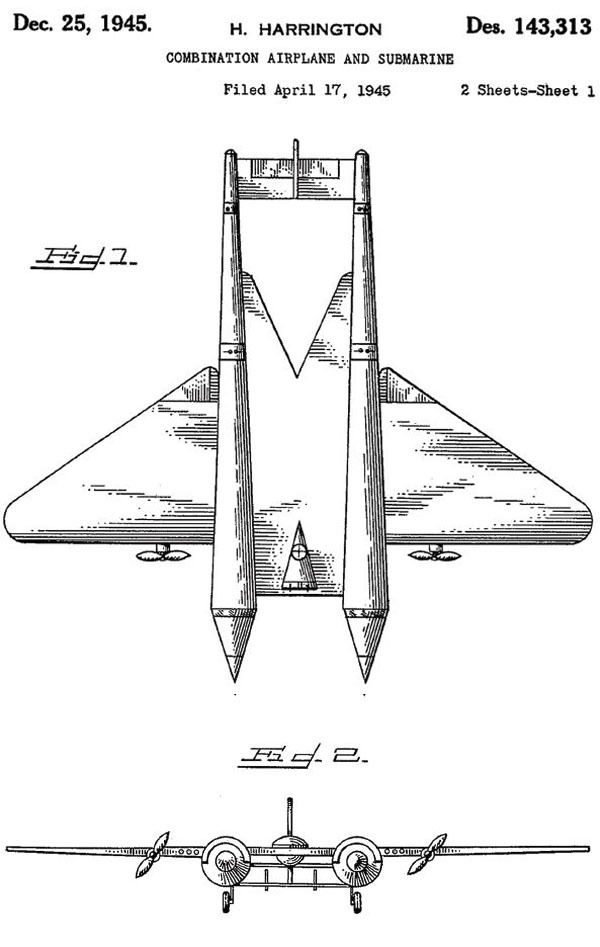
Проект ныряющего самолета Х. Харрингтона
Через 8 месяцев, 25 декабря, он получил патент, и на том всё кончилось. Ни флот, ни армия не проявили интереса к этому проекту. Аппарат Харрингтона выглядел неплохо, но о его проектных характеристиках ничего не известно. Внешне и по габаритам он похож на дальний истребитель компании «Nothrop» P-38 «Lightning» (Молния) двухбалочной конструкции, запущенный в производство в 1939 г.

ЛПЛ Харингтона
Этот самолет имел значительный ресурс для модификаций. Видимо, Харрингтон взял за основу именно его.
ТТХ P-38 В ВАРИАНТЕ «J» (1944 Г.)
Длина 11,53 м. Размах крыльев 15,86 м. Взлетный вес 9,8 т. Два мотора по 1425 л.с. Скорость (максимальная) 660 км/ч. Потолок 13,4 км. Дальность 3630 км. Вооружение: одна 20-мм пушка, 4 пулемета калибра 12,7-мм, 907 кг бомб. Торпеда воздушного сброса Mark-13 калибра 569 мм (22,4 дюйма) имела массу 1005 кг (в т.ч. 262 кг ВВ) и длину 409 м. На скорости 33,5 узла (62 км/ч) она проходила 5760 м.

LockheedP-38 “Lightning” (1939)
«Лайтнинг» вполне мог её применять при условии некоторого сокращения объёма топлива. Какой-то умник написал в интернете, что Х. Харрингтон был также известен как владелец звукозаписывающей студии «Atomic-H» в Хьюстоне (штат Техас). Эта студия действительно существовала, но она принадлежала семейству негритянских музыкантов. Автор выдумки не понял, что в данном случае Houston — не город Хьюстон в Техасе, а имя человека.
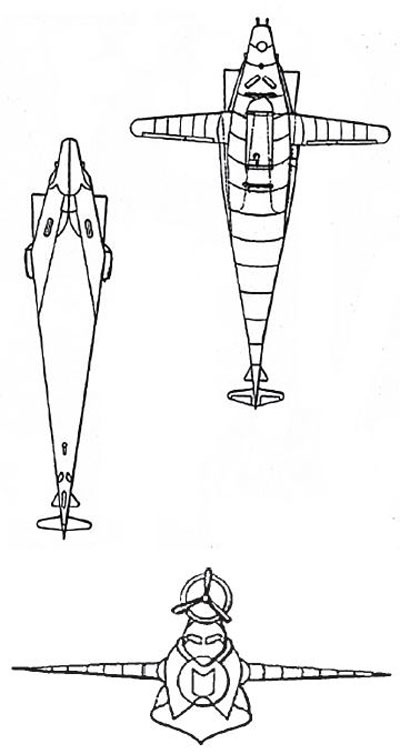
Д. Дулитл (1955)
В октябре 1955 г. инженер Дональд Б. Дулитл (DonaldB. Doolittle), совладелец и вице-президент компании «All-American Engineering Co», находившейся в городе Уилмингтон (Wilmington), в штате Делавэр, получил патент № 2,720,367 на свой проект ныряющего гидросамолета. Полет обеспечивал турбореактивный двигатель конструкции Дулитла, герметизируемый перед погружением (в 1956 г. Дулитл получил патент на этот двигатель), плавание — гребной электромотор. Взлёт и посадка с воды и на воду при помощи специальной лыжи. Вооружение — одна торпеда калибра 533 мм.
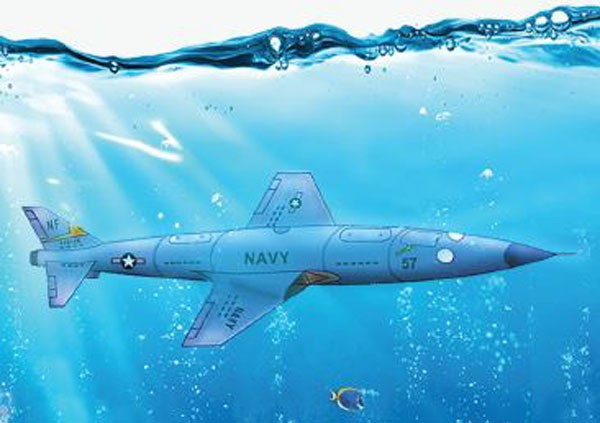
Одна из французских газет вскоре опубликовала статью, в которой оптимистично заявила, будто бы Пентагон одобрил проект и первая машина уже находится в постройке. Статью сопровождал рисунок, на котором самолет значительно увеличен в размерах по сравнению с проектом.
Вот фрагмент этой статьи:
Основанный на гидросамолете YF2Y1 «Sea Dart», по крайней мере по форме, подводный самолет представляет собой самолет с треугольным крылом. В воздухе это реактивный самолет: под водой его двигают гребные винты. Спереди устроен шлюз, позволяющий водолазам выйти поработать; в носовой части машины находится подводная телекамера, позволяющая пилоту точно ориентироваться. Наверху находится перископ, убирающийся в полете, а также труба, позволяющая пилотам дышать воздухом над поверхностью. Уже недалек тот день, когда мы увидим самолеты, вылетающие из воды! (Перевод мой — А.Т)
Но желающих реализовать этот проект в металле не нашлось. Автор статьи выдал желаемое за действительное.
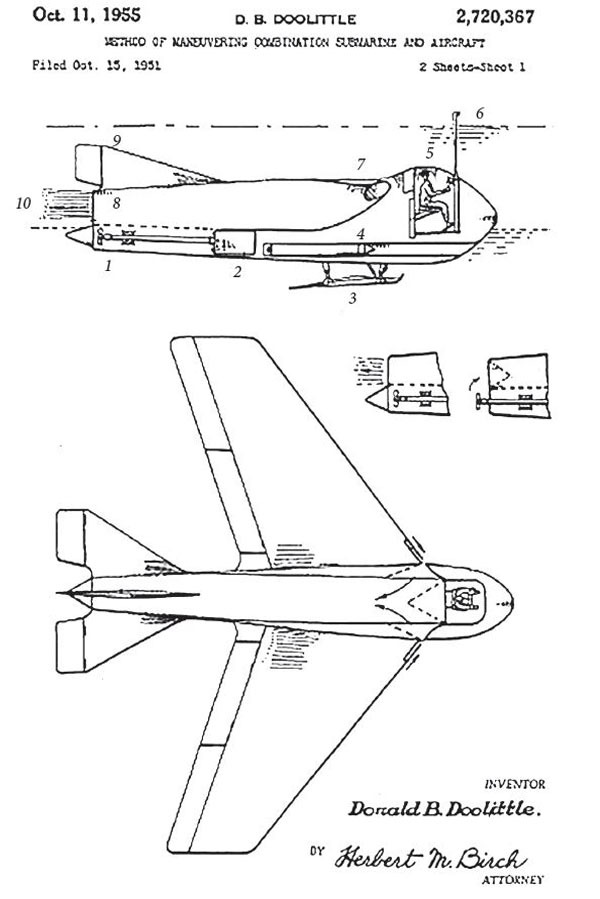
1 — гребной винт; 2 — электромотор; 3 — лыжа для посадки на воду; 4 — торпеда; 5 — кабина управления; 6 — перископ; 7 — воздухозаборник РД (с заслонкой для подводного хода); 8 — реактивный двигатель; 9 — курсовой руль; 10 — выхлопное сопло двигателя (с заслонкой для погружения)
Д. Кардуэлл и А. Крафт (1963)
Американцы Дик Кардуэлл (Dick Cardwell) и Адольф Крафт (Adolf Craft) 26 марта 1963 г. получили патент США 3,082,975 на проект ныряющего гидросамолета. К сожалению, как и в случаях с другими обладателями патентов, проектные технические характеристики не приведены. Патенты всегда содержат описание принципов работы механических устройств, подчеркивают принципиальную новизну используемых технических решений, при этом размеры, масса, мощность, грузоподъемность в них обычно не упоминают.
Проект Д. Кардуэлла (1963 г.)
Внешне, по чертежу, предложенная машина похожа на катер с двумя гребными винтами, оснащенный складными крыльями и двумя реактивными двигателями для полёта. В его задней части устроена погрузочная аппарель.

Поперечный разрез и вид спереди
Глава 4
ИНЖЕНЕРНЫЕ ПРОБЛЕМЫ
Подводные лодки летать не могут, зато гидросамолеты могут, в принципе, погружаться. Следовательно, правильная постановка вопроса такова: требуется создать ныряющий гидросамолет, а не летающую подводную лодку. Однако то обстоятельство, что вода в 775 раз плотнее воздуха, создаёт массу трудностей для конструкторов.
Вель самолет должен быть, по возможности, как можно более лёгким, чтобы свести до минимума мощность двигателей, необходимую ему для взлёта, полёта и посадки. А подводной лодке требуется очень прочный корпус (соответственно — тяжелый), способный противостоять сокрушительному давлению воды.
Самолеты летают в воздухе, используя подъёмную силу крыльев, возникающую при движении с достаточной скоростью. Подводные лодки содержат внутри себя воздух, а также забортную воду в балластных цистернах: изменяя соотношение объёмов того и другого они погружаются или всплывают.
Таким образом, при проектировании любого ныряющего летательного аппарата (НЛА) конструкторам приходится иметь дело с противоречащими друг другу требованиями аэродинамики и гидродинамики.
(1) Наибольшая техническая проблема — масса НЛА. В соответствии с законом Архимеда, для пребывания под водой на определенной глубине масса вытесняемой им воды должна быть равна массе самого аппарата. Это противоречит идее полёта в воздухе, согласно которой аппарат должен быть как можно легче. Чтобы самолёт мог находиться под водой, он должен увеличить свой вес примерно в 4 раза. Для этого есть два основных способа:
• В фюзеляже и крыльях разместить специальные ёмкости для водяного балласта (до 30 % объёма этих конструкций), чтобы самолёт погрузился, заполнив ёмкости забортной водой;
• Заполнить водой внутреннее пространство самолета, кроме кабины пилотов, двигателей, топливных баков, аккумуляторов, отсека для полезного груза.
Второй способ дает определенную экономию веса машины и мощности двигателя по сравнению с первым способом. Но в том и другом случае нужны хорошо продуманные конструкции систем затопления и продувки, а также системы перекачки топлива между баками для поддержания продольной и поперечной остойчивости в полёте и под водой.
(2) Давление воды и прочность машины. Трудноразрешимой проблемой является сопротивление конструкции самолета давлению воды при погружении. Каждые 10 метров глубины увеличивают давление воды на 1 атмосферу (с поправкой на давление воздушного столба к итогу добавляется цифра 1).
Так, на глубине 25 метров давление составляет 2,5 атмосферы (с поправкой — 3,5), на глубине 50 метров уже 5 атмосфер (с поправкой — 6).
Такого давления не выдержит ни один обычный самолёт. Чтобы противодействовать давлению забортной воды, необходимо значительно увеличить общую, а не только аэродинамическую прочность самолета, следовательно — и его массу. Вот почему НЛА в принципе не способен погружаться на значительную глубину. Теоретически, она ограничена 20–23 метрами, но в имеющихся проектах не превышает 8–10 метров.
Дело в том, что в воде внутреннее пространство НЛА, заполненное воздухом, сопротивляется внешнему давлению забортной воды. Уменьшить разницу между их значениями можно лишь одним способом — погрузив машину ненамного ниже поверхности моря. Это существенно снижает наружное давление, а сам аппарат можно в таком случае сделать достаточно легким для взлёта. Кроме того, в процессе проектирования необходимо точно рассчитать соотношение динамических нагрузок в полёте и в подводном плавании.
(3) Выбор формы НЛА. Необходимо найти форму (в трех плоскостях) фюзеляжа, крыльев, оперения, двигателей, оптимальную и в плане аэродинамики, и в плане гидродинамики (обычная самолётная, треугольное крыло, «утка», центроплан, низкоплан, высокоплан). Гидросамолёты в подавляющем большинстве случаев высокопланы, чтобы свести до минимума контакт крыла с водой, защитить от воды воздухозаборники двигателей и сами двигатели.
А для погружения лучше низкоплан, чтобы крыло сразу входило в воду и способствовало погружению своей отрицательной плавучестью. Кроме того, НЛА должен хорошо летать, а в воде легко маневрировать. Тут возможны самые разные варианты решений. Например, одно крыло с изменяемой геометрией (по профилю, контуру, площади). Главное условие для решения проблемы крыла, фюзеляжа, оперения — достижение одного и того же значения числа Рейнольдса на очень разных скоростях: в воздухе от 185 до 740 км/час, в воде от 9,25 до 22,2 км/час (5–12 узлов)*.
* Число Рейнольдса (Re) есть мера отношения cил инерции к силам вязкости. Плотность в числителе выражения характеризует инерцию частиц, претерпевающих ускорение, а величина вязкости в знаменателе характеризует способность жидкости или газа препятствовать такому ускорению
(4) Двигатели. Полет в воздухе и подводное плавание — в смысле особенностей работы двигателей — тоже принципиально разные процессы. Поэтому конструкторам приходится делать выбор: либо они используют раздельные двигатели для движения в воздухе и в воде, либо создают комбинированную двигательную установку для работы в воздухе и в воде. Если НЛА должен взлетать не с поверхности воды, а прямо из глубины, требуются очень мощные двигатели, причём двухсредовые.
Для турбовинтового двигателя это невозможно при любой прочности материалов, а для реактивного требуется совмещать гидрореагирующее топливо с обычным авиационным керосином. И при этом надо вдобавок решить проблему начального обеспечения такого двигателя воздухом на взлёте. Авиамоторы нуждаются в надежной гидроизоляции, чтобы сохранить способность к запуску после всплытия на поверхность воды.
Воздухозаборники и выхлопные трубы в любом случае необходимо размещать выше ватерлинии машины, находящейся на поверхности воды, и вне зоны брызг от корпуса и (или) гидролыж самолета, глиссирующего по воде.
Наконец, существует ещё одна проблема: очень непросто подобрать энергоёмкие и при этом лёгкие аккумуляторы, а также мощный, но легкий электромотор для эффективного перемещения самолета под водой.
(5) Водонепроницаемость. Кабина пилотов, отсек для пассажиров или полезного груза, приборы управления, ориентации и связи, двигатели, топливо (или топливные элементы), аккумуляторы, электромотор должны быть надежно защищены от проникновения воды и от её давления извне. Правда, пилоты и пассажиры могут находиться и в «мокрой кабине», если используют кислородные либо воздушные дыхательные приборы, а также гидроизолирующие костюмы с электроподогревом.
Теоретически это возможно, но на практике сопряжено с множеством неудобств. Все средства управления, навигации и связи должны надежно работать в полете, в плавании по поверхности воды и под водой. Все конструкционные материалы должны быть защищены от коррозии и гальванического воздействия в водной среде.
(6) Проблема обитаемости. Имеется в виду оптимальное сочетание систем, созданных для самолетов и подводных лодок, с особым вниманием к конструкции кабины пилотов и (или) пассажирского салона, системы подачи и регенерации воздуха при подводном движении, к средствам аварийной эвакуации в полете и под водой.
АНАЛИЗ Ю. ХЭНДЛЕРА
Юджин Хэндлер (Eugene H. Handler), инженер по гидродинамике гидросамолетов, сотрудник Бюро вооружения флота США, в сентябре 1964 г. опубликовал статью в журнале «Записки военно-морского института США». Проанализировав в ней проекты НЛА, известные к 1964 г., он пришёл к выводу, что ТТХ подобного аппарата должны находиться в следующей «вилке»:
экипаж: 2 человека;
глубина погружения: минимум 8, максимум 20 м;
скорость под водой: от 3 до 7 узлов (5,5–13 км/ч);
автономность под водой: от 4 до 10 часов;
дальность плавания под водой: от 20 до 40 км;
скорость полёта: от 280 до 410 км/ч за 2–4 часа;
высота полёта над морем: 250–750 м;
дальность полёта: 300–800 км;
стартовый вес: от 12 до 15 тысяч фунтов (5,45–6,8 т);
полезная нагрузка: от 500 до 1500 фунтов (230–680 кг).
Каждая из указанных характеристик является минимальной и для самолета, и для подводной лодки. Но сочетание их в одном аппарате создаст выдающуюся машину.
Хэндлер заявил:
"Разработка работающего прототипа летающей подводной лодки задача сложная и трудоёмкая, но потенциальный результат разработки будет существенным и ценным. Следовательно, концепция такого аппарата требует тщательной инженерной экспертизы. При этом необходимо избегать крайностей — как чрезмерно оптимистических похвал со стороны некоторых энтузиастов, так и холодного отрицания твердолобых реалистов."
Безусловно, он был прав. Задача чрезвычайно сложная. Именно поэтому до сих пор никто не смог создать пилотируемый НЛА, удовлетворяющий всем изложенным здесь требованиям. Это касается и наиболее «продвинутых» проектов вроде «Aeroship » или «Petrel».
Неизвестно, как они повели бы себя на испытаниях. Ибо неоспорима старая мудрость: «гладко было на бумаге, да забыли про овраги»!
Глава 5
ПОПЫТКИ РЕАЛИЗАЦИИ ИДЕИ
Ныряющий самолет Рейда
Американец Дональд Рейд (Donald V. Reid; 1912–1991) спроектировал, и построил несколько действующих макетов самолета, способного летать в воздухе и двигаться под водой. Инженер-электрик по профессии, Д. Рейд работал на военноморской испытательной станции турбин в Западном Трентоне*.
* Западный Трентон (West Trenton) — пригород Трентона в штате Нью-Джерси.
А его внеслужебным увлечением было создание моделей самолетов и подводных лодок. Однажды вечером в 1956 г. он строил радиоуправляемую модель подводной лодки в своей мастерской, и вдруг крылья для макета самолета упали с полки на корпус этой лодки. И тут в голову Рейда вдруг пришла мысль: а что, если смастерить такой гидросамолет, который сможет погружаться в воду, плавать в глубине, потом всплывать на поверхность и взлетать в воздух?!
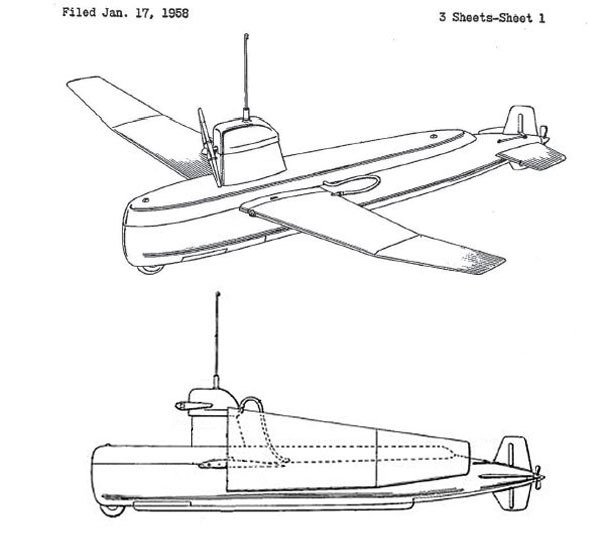
Рисунки из патента Д. Рейда. Реально построенная машина значительно отличалась от этих чертежей
Дон увлек своей идеей сына Брюса и дочь Кэрол. С их помощью он строил и испытывал все более крупные модели задуманного им аппарата. Оказалось, что это не просто. Ведь модель самолета должна быть максимально легкой, чтобы её мог поднимать в воздух миниатюрный бензиновый моторчик с пропеллером.
А модель подводной лодки должна быть достаточно прочной (следовательно, более тяжелой, чем модель самолета), чтобы в движении она не развалилась от сопротивления воды.
Добившись более или менее приемлемых результатов при испытании моделей, Д. Рейд 17 января 1958 г. подал патентную заявку на свой аппарат, который назвал «Летающей подводной лодкой» (Flying submarine). Неизвестно, кто и как изучал три листа чертежей и приложенное к ним описание, но факт остается фактом: патент был выдан только через пять с половиной лет — 4 июня 1963 года! За два года до получения патента, в 1961 г.,
Рейд построил радиоуправляемую демонстрационную модель летающей подводной лодки длиной 3 фута (91 см), с крылом размахом 3,5 фута (107 см). Она успешно летала, садилась на воду, погружалась и плыла на небольшой глубине. Модель имела микродвигатель внутреннего сгорания и радиоаппарат с антенной для дистанционного управления.
Бак с бензином играл роль балластной цистерны. Когда модель садилась на воду, рычажок с электромагнитным приводом по радиокоманде открывал клапан в баке и в него самотёком поступала вода, вытесняя наружу более легкий бензин. После подводного плавания насос, работающий от электромотора, питаемого батарейкой, выкачивал воду из бака и модель всплывала. Но остался нерешенным главный вопрос: как взлететь после всплытия, если весь бензин вытек?
К сожалению, на принципиальном уровне Рейд эту проблему так и не решил. В построенном им полноразмерном самолете пилот заливал бензин из канистры, которую ему подавали с лодки. Получив патент, Рейд построил поплавковый гидросамолет-моноплан длиной 23 фута (7,01 м) с крылом размахом 32 фута (9,75 м).
Основой для него послужили списанный легкомоторный колесный самолет и два фанерных поплавка, которые Рейд купил за 100 долларов. Четырехцилиндровый двигатель «Lycoming» мощностью 65 л.с. (48 кВт), установленный на пилоне, обеспечивал полет; электромотор мощностью в одну лошадиную силу (0,74 кВт) вращал гребной винт в хвосте. Пилот сидел в открытой кабине и для погружения ему требовался акваланг. Баки с горючим служили также балластными цистернами.
После посадки на воду остатки горючего откачивались в водоём, и насос закачивал в баки забортную воду. Кроме того, самотёком затапливался фюзеляж. Но перед началом погружения пилоту надо было снять пропеллер, а бензиновый мотор загерметизировать резиновым чехлом. Чехлом служил резиновый бензобак от бомбардировщика времен Второй мировой войны.
Местный аэроклуб зарегистрировал аппарат в качестве частного легкомоторного самолета № 1740. Его неофициальными названиями были RFS-1 (Reid’s flying submarine first) и «Commander-1».

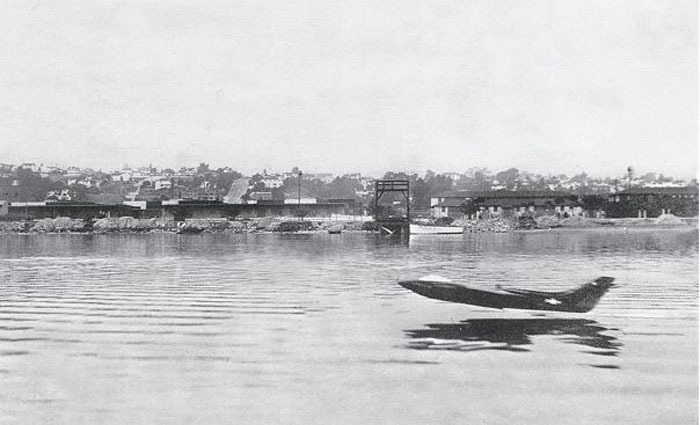
RFS-1 движется по воде (пропеллер вращается)
Первая публичная демонстрация состоялась 9 июня 1964 г. Пилотируемый Брюсом Рейдом, сыном Дональда, RFS-1 сначала взлетел с воды и на высоте около 10 метров пролетел 77 футов (23,47 м) над рекой Шрусбери (Shrewsbury). Добитый списанный «движок» мог обеспечить только короткие «прыжки» над водой.
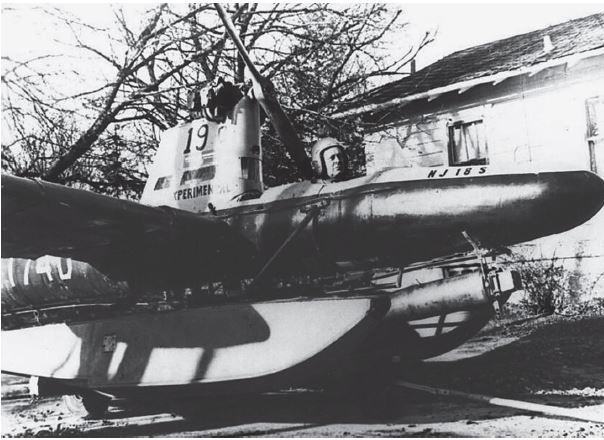
Д. Рейд в кабине своей ЛПЛ
После этого пилот подготовил самолет к погружению, погрузился в воду, плыл там несколько минут на глубине примерно 2,65 метра со скоростью 3,7 км/ч (2 узла), потом совершил поворот и всплыл. Проблема возникла, когда потребовалось снова превратить лодку в самолет. Брюс снял чехол с двигателя, прикрепил пропеллер, залил бензин в бак, включил мотор, но мокрый RFS-1 развил скорость всего-навсего 8,33 км/час (4,5 узла). Взлёт после всплытия не состоялся.

RFS-1 погружается в воду. Мотор снят, пилон закрыт чехлом
Тем не менее это был успех. Дональд Рейд убедительно доказал, что самолет способен превращаться в подводную лодку. В то время был разгар «холодной войны», все думали о новых видах оружия.

Брюс Рейд на крыле всплывшего самолета
Подводная лодка хороша для того, чтобы подкрасться к вражескому кораблю и взорвать его торпедой. Но такая подводная лодка, которая нанесет смертельный удар, а затем, подобно баклану, вынырнет из пучины и улетит, ещё лучше.
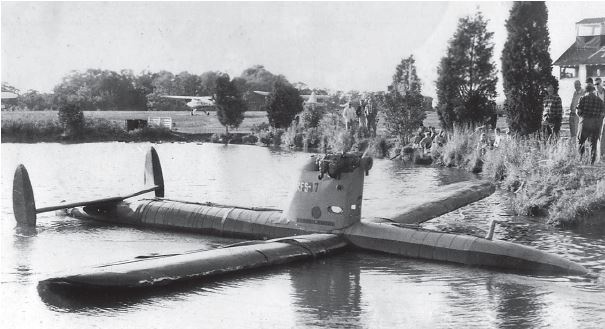
RFS-1 после всплытия
Вдохновляясь подобными мыслями, Д. Рейд надеялся, что теперь флот закажет ему летающую субмарину с мощными двигателями, насосами, аккумуляторами и всем прочим. Но хотя статья об RFS-1 в том же 1964 г. появилась в какомто научно-популярном журнале, флот обратился не к Рейду, а к профессиональным авиационным инженерам, работавшим в компаниях «Сonvair» и «Lockheed». Об этом — ниже.

RFS-1 на взлете (фото 1967 г.)
В 1968 г. Рейд построил большой макет двухместного RFS-2 с турбовентиляторным двигателем! На испытаниях он развил скорость 230 км/час. Скорость в подводном положении достигла 12 км/час (6,48 узла). Глубина погружения составила 3,5 м. Однако командование американского флота не проявило интереса и к этой модели.
Возможно, причина заключалась в том, что RFS-2 (Commander- 2) имел тот же недостаток, что и RFS-1: топливные баки служили также балластными цистернами.
Д. Рейд ещё долго пытался усовершенствовать свою ЛПЛ, но план разбогатеть на продаже чертежей военному флоту не оправдался. После смерти изобретателя его семья подарила RFS-1 Среднеатлантическому музею авиации (MidAtlanticAirMuseum) в г. Рединг (Reading), штат Пенсильвания. А в 2004 г. сын Брюс издал книгу «Летающая субмарина: история изобретения летающей субмарины Рейда RFS-1».
Исследование компании «General Dynamics» (1962)
В 1962 г. Бюро вооружений флота CША (Bureau of Naval Weapons— BNW) начало поиск решений по улучшению самолётов ПЛО, так как появление cкоростных глубоководных АПЛ (подводных лодок с ядерными энергетическими установками) серьёзно осложнило противолодочную оборону. Будучи обнаруженной, АПЛ могла быстро уйти на глубину и скрыться от преследователей.
Например, 12 советских АПЛ первой серии (проект 627А), вступивших в строй в 1959–63 гг., развивали под водой скорость 28 узлов (51,8 км/ч) и могли погружаться на глубину до 300 метров. Восемь лодок второй серии (проект 658), вступившие в строй в 1959–62 гг., ходили под водой со скоростью до 29 узлов (53,7 км/ч). Чтобы осознать качественный скачок, сравним их с самой массовой советской подводной лодкой проекта 613 (в 1950–57 гг. построили 215 единиц) с дизель-электрической ЭУ. Она развивала под водой максимум 13 узлов (24 км/ч), а её глубина погружения не превышала 170 м.
Срочно требовалась система, гарантирующая уничтожение новых субмарин. Одним из направлений поиска эксперты признали разработку самолётов, способных погружаться подобно подводным лодкам и вести с ними борьбу в их среде. В отличие от обычного самолёта с глубинными бомбами, от самолёта-субмарины вражеская АПЛ не скроется. Гибридный самолет, взлетев по тревоге, достигнет района, где обнаружена АПЛ максимум за 2 часа, тогда как кораблям и подводным лодкам на это требуется много часов, или даже сутки.
Далее Бюро вооружений флота заключило небольшой контракт (на 30 тысяч долларов) с концерном «General Dynamics» на разработку предэскизных проектов. Все они имели шифр «High Density Seaplane» (HDS) — тяжелый гидросамолет. Таких проектов известно четыре.
Первый проект. Самолет-носитель, сбрасывающий в заданном квадрате моря сверхмалую скоростную субмарину (СмПЛ), вооружённую торпедами (в том числе с атомной бомбой в боевой части торпеды).
Правда, такой СмПЛ в наличии не было, требовалось создать её с нуля. Ведь подводная скорость всех построенных или проектируемых СмПЛ, известных к 1962 г., не превышала 7 узлов, а глубина погружения — 80 м.
Проект 1. Самолёт (ВВП) — носитель сбрасываемой СмПЛ
Только в США в 1955 г. построили опытовую СмПЛ SSX-1 с двигателем единого хода, работавшим на перекиси водорода. Она развивала под водой скорость до 22 узлов (40 км/ч), но глубина погружения этой малютки не превышала 60 м, вооружение отсутствовало. А её двигатель имел склонность к самовозгоранию.
В феврале 1958 г. он взорвался и его заменили обычным дизелем. После этого скорость упала до 6 узлов! Масса SSX-1 (без экипажа в составе 4 человек) была 31,5 т. Понятно, что для её транспортировки требовался самолет-гигант, которого тоже не было. В общем, этот вариант отвергли сразу*.
* В СССР в 1934–35 гг. был разработан примерно такой же проект. Огромный двухкорпусный 6-моторный гидросамолет АНТ-22 (длина 24 м, размах крыльев 51 м, вес пустого 21,6 т) должен был нести СмПЛ (шифр АПСС), вооруженную одной торпедой калибра 457 мм. Длина лодки 10 м, диаметр 1,25 м, вес 7,2 т, скорость хода под водой 4,5 узла (8,33 км/ч) на протяжении 6 часов с минутами. Дальность хода до полной разрядки аккумуляторов 25–28 миль (46–52 км). Но испытания показали непригодность АПСС для применения в боевых условиях.
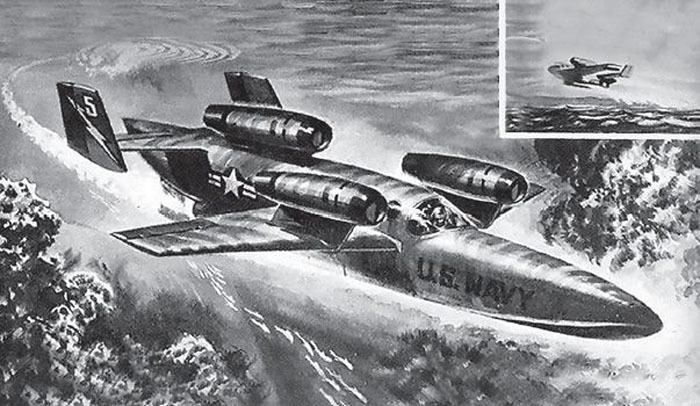
Второй проект.Сверхзвуковой самолёт вертикального взлёта и посадки, имеющий 6 двигателей: 4 малых турбореактивных для вертикального взлёта и посадки, «большой» турбореактивный маршевый, подводный реактивный на гидрореагирующем твёрдом топливе.
Проект 2. Сверхзвуковой HDSВВП. Взлёт. Крышки турбовентиляторов открыты
Этот проект имел (на бумаге) превосходные ТТХ, но 6 двигателей оставляли мало места для балластных цистерн и ограничивали вооружение одной торпедой.
Проект 2. HDS под водой. Крышки обоих турбовентиляторов закрыты
Третий проект. Экраноплан. Такая схема позволяла создать летательный аппарат с коротким крылом, далеко не лучший в плане аэродинамики, но более пригодный для движения и маневрирования под водой чем самолет обычной схемы.
Проект 3. Экраноплан HDSв полёте
Другая особенность — один двигатель, работающий в полёте на авиационном керосине, под водой — на гидрореагирующем твёрдом топливе. Однако такой двигатель ещё предстояло сконструировать и испытать.
Экраноплан HDS под водой. Внизу — торпеды
СПРАВКА
Гидрореагирующее топливо для реактивных двигателей интенсивно горит только в морской воде. Топливо пастообразное, подается в двигатель поршневым устройством. В основном используется в торпедах, так как горит без подачи кислорода. Известны три вида такого топлива.
Первым появилось Otto-Fuel II. Его изобрел доктор Отто Райтлингер (Otto Reitlinger) в США в 1963 г. Оно на 76 % состоит из динитрата пропиленгликоля (сложного эфира азотной кислоты и пропиленгликоля, структурно схожего с нитроглицерином), на 22 % из дибутил себацината, на 1,5 % из двухнитродифенил-амина.
Второй вид — смесь порошка алюминия с магнием, легированным никелем.
Третий вид — смеси полибутадиена с гидроксильными группами веществ.
Этот проект обещал (на бумаге) машину, способную нести две торпеды, быстро и глубоко плавать под водой, однако требовал множества дополнительных исследований. Его тоже отклонили.
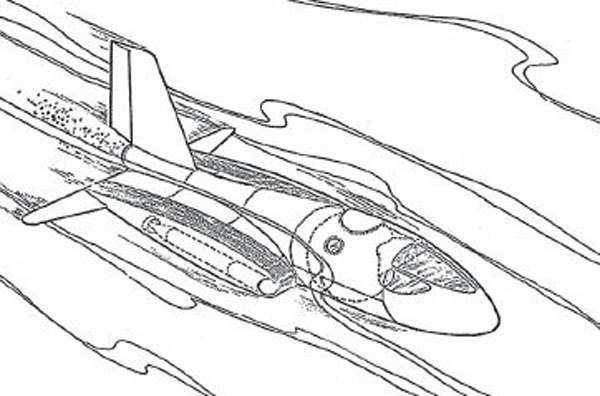
Четвертый проект. Дозвуковая летающая лодка обычной схемы. Предэскизная проработка показала, что её летные и подводные характеристики будут хуже, чем в предыдущих вариантах, зато вся техника, необходимая для проекта, уже существует.
В воздухе лодка полетит на трех турбореактивных двигателях, под водой поплывет на электромоторе с гребным винтом.
При посадке гидролыжа ослабит удар о поверхность воды. После посадки за 2 минуты произойдет автоматическая герметизация двигателей и кабины пилотов, после чего самолёт погрузится на небольшую глубину. Подготовка к взлёту займет больше времени, так как она включает в себя проверку двигателей.
HDS: четвертый проект
При обнаружении атомной подводной лодки противника две такие машины вылетят с прибрежной базы в заданный район и начнут охоту. Работа парами планировалась потому, что каждый самолет мог нести только одну торпеду с ядерной боевой частью (тяжелые аккумуляторы для подводного хода ограничивали массу полезого груза самолета).
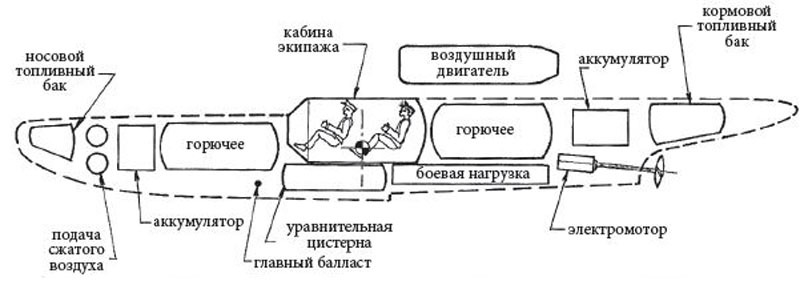
Внутреннее устройство HDS № 4
Именно этот вариант Бюро вооружения флота признало наиболее перспективным и в 1963 г. заключило контракты с компаниями «Convair» (Consolidated Vultee Aircraft) и «Lockheed» на разработку рабочего проекта*.
* Компания «Convair» с 1953 по 1994 гг. являлась одним из подразделений концерна «General Dynamics». В 1994 г. ликвидирована. Внутреннее устройство HDS № 4 носовой топливный бак кабина экипажа воздушный двигатель аккумулятор кормовой топливный бак подача сжатого воздуха аккумулятор главный балласт уравнительная цистерна электромотор горючее горючее боевая нагрузка
ТАКТИКО-ТЕХНИЧЕСКОЕ ЗАДАНИЕ БЮРО ВООРУЖЕНИЯ -
полезный груз (без учета веса пилотов) от 1000 до 1500 фунтов (450–680 кг); крейсерская скорость полета 350 км/ч, максимальная — 410 км/ч; высота полета — от 250 до 750 м; дальность полёта на крейсерской скорости — 500 американских миль (800 км); взлет и посадка при волнении моря до 2-х баллов (волны высотой до 0,55 м); подводная скорость от 5 до 8 узлов (9,2–14,8 км/ч); глубина погружения до 75 футов (23 м); дальность подводного плавания от 10 до 20 морских миль (18,5– 37 км); автономность под водой по запасу воздуха — 10 часов.
Проекты компании «Lockheed»
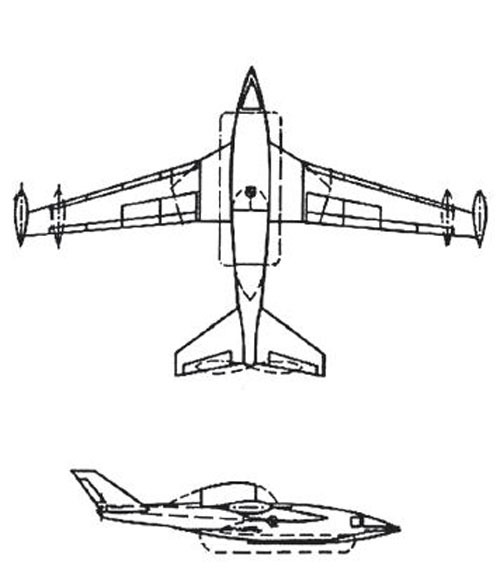
Эта компания имела в своем активе длинный ряд удачных самолетов, в том числе для морской авиации. Но гидросамолетов, к тому же реактивных, среди них не было. Новые проекты конструкторы разработали с нуля. Они получили обозначения CL-865-1 и CL-865-2.
У обоих прямое удлиненное крыло, экипаж из 2-х человек, один и тот же турбовальный двигатель «Allison» Т56, шасси в виде гидролыж. В проекте 865-1 (длина 10,97 м; размах крыльев 19,71 м; высота 3,52 м) мотор Т56 с пропеллером установлен на пилоне значительно выше фюзеляжа; в проекте 865-2 (длина 9,07 м; размах крыльев 10,59 м) два двигателя с турбовинтовыми нагнетателями размещены по сторонам фюзеляжа. ТТХ обеих конструкций укладывались в рамки, обозначенные в тактико-техническом задании.
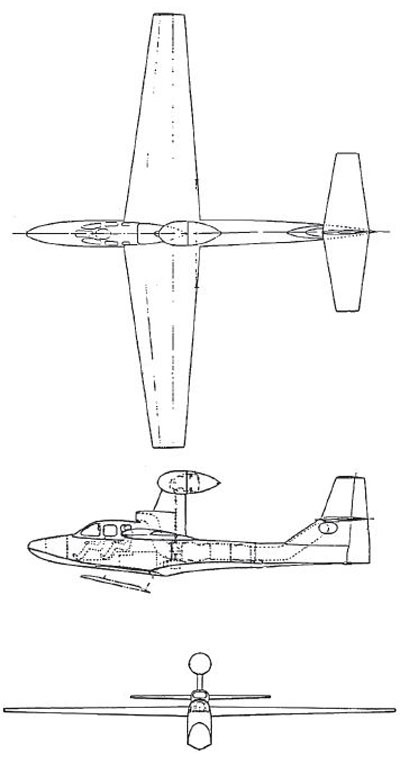
«Локхид», проект CL-865-1
При этом проект-2 выглядел более продвинутым. В нем крылья складывались назад вдоль корпуса, что уменьшало сопротивление воды, а также применялся ракетный ускоритель взлета (JATO). Кроме того, у самолета в этом варианте размеры и масса меньше, чем в первом.
Однако заказчик (Бюро вооружения флота) признал перспективным проект компании «Convair», который был основан на использовании уже имеющейся техники.

«Локхид», проект CL-865-2
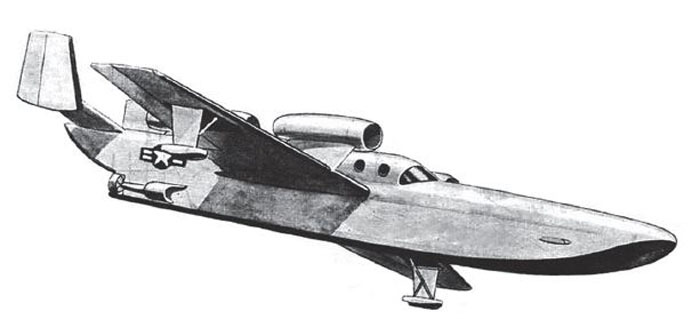
Проекты компании «Convair»
Еще в 1952 г. эта компания спроектировала экспериментальный сверхзвуковой гидросамолет- истребитель «Skate» (Конёк). Именно он послужил основой для проекта ныряющей лодки «Aeroship» (мoдель 815).
У этой гибридной лодки узкий корпус с гладким днищем (без редана), двухкилевое хвостовое оперение и три двигателя: два турбореактивных и один турбовентиляторный.
Макет «Конька» на взлете с реки
Первые два служат для взлета и посадки, третий — для длительного полета с крейсерской скоростью. Топливные баки размещены в крыльях. Для посадки на воду и для взлёта с неё самолет выдвигает две гидролыжи. Он может передвигаться с большой скоростью по водной поверхности одним из двух способов: на гидролыжах или на днище лодочного корпуса.
Перед погружением пилоты дистанционно закроют воздухозаборники и выхлопное отверстие турбореактивных двигателей задвижками; после этого откроют водозаборники и включат насос, заполняющий балластные цистерны в носовой и кормовой частях фюзеляжа.
«Aeroship» погрузится. Втянув лыжи и включив электромотор, питаемый от аккумуляторов, он превратится в подводную лодку. Чтобы всплыть и взлететь, операции нужно проделать в обратном порядке. Воду из цистерн вытесняет сжатый воздух из баллонов. Кабина пилотов и авионика помещены в водонепроницаемые контейнеры, устойчивые к давлению воды на максимальной глубине погружения. Остальная часть машины открыта для затопления — это крылья и фюзеляж. Рули направления и глубины одновременно являются элеронами.
ТАКТИКО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
«Skate»: Длина 25,3 м; размах крыльев 19,35 м. Сухой вес 5730 кг, взлётный вес 9750 кг. Два турбореактивных двигателя «Westinghouse WE-10» тягой 3596 кг/сек каждый (при форсировании тяга возрастает до 5335 кг). Максимальная скорость 1140 км/ч. Потолок 23835 м. Боевой радиус 736 км. Вооружение: 4 пушки калибра 20 мм, или 30 ракет «воздух — воздух» калибра 127 мм.
«Aeroship»: Длина 12,8 м; размах крыльев 9,15 м; высота 3,66 м. Сухой вес 9,5 т, взлётный — 13,6 т. Два турбореактивных двигателя «Westinghouse». Максимальная скорость 445 км/ч. Потолок 760 м. Боевой радиус 925 км. Пассажиры: 6 боевых пловцов.
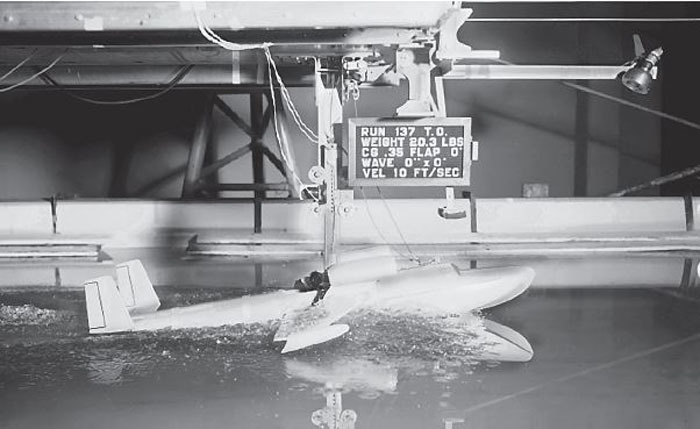
Испытания макета «Аэрошипа» в опытовом бассейне
Сложной проблемой оказалось удаление воздуха из двигателей и частично заполненных топливных баков при погружении (чтобы снизить плавучесть машины). Конструкторы предложили открывать нижнюю часть этих баков в море, используя резиновую диафрагму для разделения бензина и воды, а гондолы двигателей — для удержания вытесненного топлива.
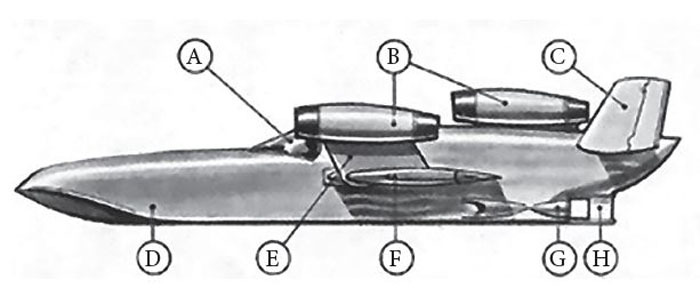
A— кабина пилотов; B— реактивные двигатели для полёта; C— хвостовое оперение с рулями высоты и направления полета; D— обтекаемый корпус летающей лодки (с гидролыжами) для взлёта с воды и плавания по поверхности; E— пилоны двигателей крыла; F— крыло и элероны управления полетом; G— скрытый гребной винт; H— подводный курсовой руль
Перед погружением пилот должен отключить подачу топлива к двигателям, немного повращать их стартерами, чтобы охладить металл, закрыть дроссельные заслонки в каждом конце гондол и открыть забортные клапаны внизу топливных баков. Когда самолет погружается, вода поднимается в баки под резиновой мембраной, выталкивая топливо в гондолы двигателей. После всплытия топливо стечет обратно в бак.

Модель «Аэрошипа» для продувки в аэродинамической трубе
Единственное неприятное следствие этой процедуры — облако сажи при запуске двигателей. Когда двигатели заработают, их тяга приподнимет самолет на лыжах, благодаря чему самотёком произойдет осушение фюзеляжа и крыльев. Время перехода от всплытия к взлету составит 2–3 минуты.
Материалы для постройки машины — нержавеющая сталь и титан. Кабина экипажа (в виде капсулы) — из титана и армированного стекловолокна. В чрезвычайной ситуации капсула будет выброшена из самолета, и опустится на парашюте (если авария случится во время полета), или же всплывет на поверхность (если авария произойдет на глубине). В том и другом случае герметично закрытая капсула станет спасательным модулем.
«Convair» model-815/16 (облегченная)
Компания построила масштабные модели, которые успешно прошли испытания. Они скользили по воде, погружались в воду, маневрировали, потом всплывали на поверхность и взлетали. Полученные результаты обнадеживали. Кроме того, в «Convair» спроектировали облегчённый вариант машины для испытаний в полёте и под водой (модель 815-16).
«Аэрошип» в полёте
От прототипа она отличалась меньшими размерами, отсутствием полезного груза и одним пилотом вместо двух. На ней проектировщики хотели проверить некоторые инженерные решения, в которых не были уверены. В первую очередь — складывание крыльев вдоль фюзеляжа.
«Аэрошип» под водой
Вывод первого прототипа ныряющего самолёта на испытания планировался в 1968 г., а развёртывание серийного производства машины не позже 1970 г. Командование флота было заинтересовано в проекте — хотя бы для того, чтобы проверить на практике идею ныряющего гидросамолета.
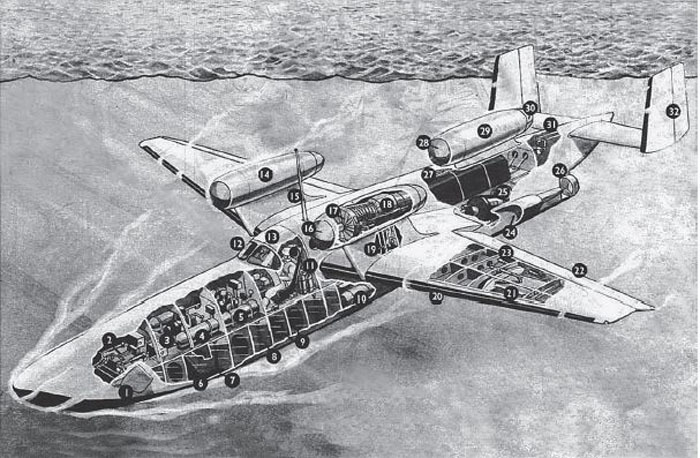
1) выдвижные рули глубины (гидропланы) могут действовать в полёте как стабилизаторы; 2) гидросамолетный привод; 3) воздушные компрессоры с электроприводом; 4–5) баллоны сжатого воздуха для продувки балластных цистерн; 6) днище корпуса; 7) водорегулирующие клапаны; 8) водонепроницаемые переборки; 9) балластные цистерны; 10) глубинные бомбы; 11) кислородный дыхательный аппарат; 12) бронированное смотровое стекло; 13) аварийный люк экипажа; 14) правый турбореактивный двигатель; 15) выдвижной перископ; 16) пе-реднее водонепроницаемое уплотнение двигателя (закрывается при погружении в воду); 17) воздухозаборник двигателя для полёта; 18) левый турбореактивный двигатель; 19) приборы управления двигателем; 20) противообледенитель; 21) убирающиеся поплавки законцовок крыла сложены; 22) элевоны, выполняющие функции рулей высоты и элеронов в полёте, органов управления движением под водой; 23) разъёмы управления элевоном; 24) водозаборный канал к гребному винту; 25) электромотор; 26) гребной винт; 27) топливные баки в фюзеляже; 28) передний водонепроницаемый уплотнитель двигателя (закрыт); 29) задний турбореактивный двигатель; 30) водонепроницаемый отсек кормового двигателя; 31) сдвоенные рули направления, которые работают и под водой
Но в 1966 г., после обращения за дополнительным финансированием в Конгресс США, проект «зарубил» Аллен Д. Элендер (Allen Joseph Ellender; 1890–1972), cенатор от штата Луизиана, занимавший пост председателя Комитета сената по вооружениям. Остались только модели, чертежи и расчеты.
«Трифибия» (1970)
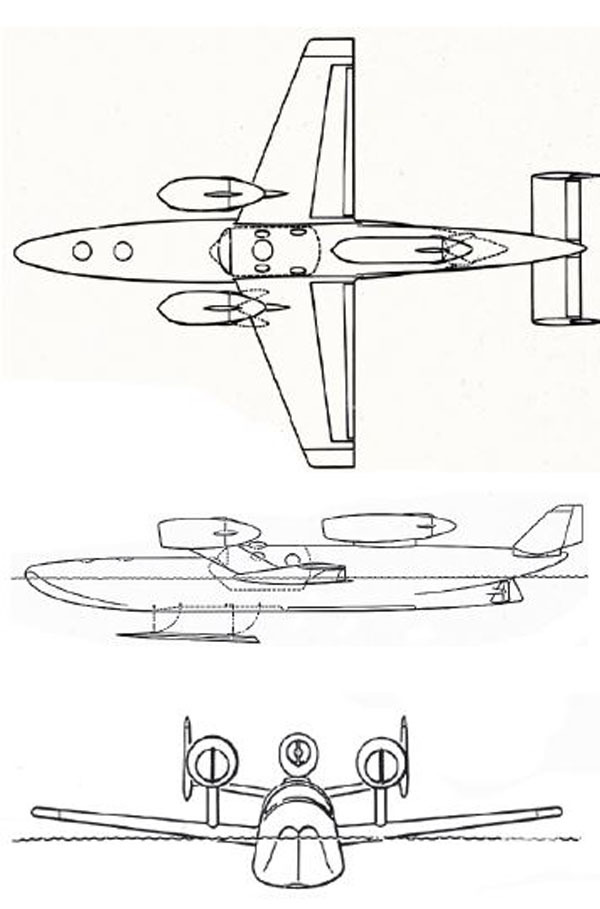
На рубеже 1969–1970 гг. группа французских студентов — промышленных дизайнеров, в сотрудничестве с инженерами авиастроительной компании «Дассо» (Dassault), разработала эскизный проект погружаемого гидросамолета под названием «Trifibium».
По проекту, он мог летать в воздухе, плавать на поверхности моря и в его глубине. Основная цель проектирования заключалась в создании транспортного средства для стационарных подводных баз. Самолет должен был летать со скоростью около 600 км/ч. Сев на воду как гидросамолет, он сложит оба крыла вдоль фюзеляжа, герметизирует воздухозаборники двигателей и выхлопных сопел, развернет в носовой части малое крыло для подводного плавания, после чего погрузится и поплывет в глубине.
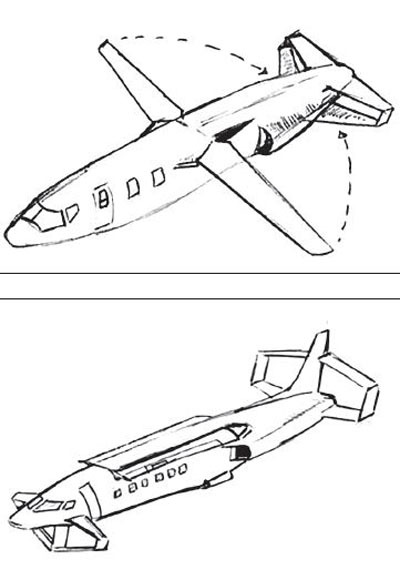
ЛПЛ «Trifibium». На нижнем рисунке показано подводное крыло
В аварийной ситуации балластные цистерны будут автоматически продуваться сжатым воздухом и самолет всплывёт на поверхность воды. Водомёты позволят ему развивать на глубине скорость до 20 км/ч (10–11 узлов). Пассажирский отсек (8 × 2 м) рассчитан на 12 человек. Убираемое трехопорное шасси позволит приземляться на обычную бетонную полосу. Однако непонятно, где оно могло быть размещено, так как толщина крыльев это исключало.
«Трифибия», в отличие от «Аэрошипа», не была охотником за подводными лодками. Она представляла собой «челнок» для связи с подводными объектами, как гражданскими, так и военными. Но идея подводных баз и поселений, популярная в 1960-е го-ды, вскоре умерла «естественной смертью», поэтому ныряющий гидросамолет остался в чертежах.
«Petrel» (1976)
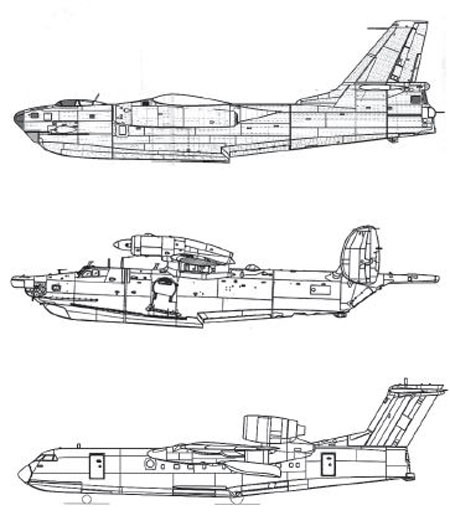
Двое выпускников Технического университета штата Вирджиния в середине 70-х годов спроектировали ныряющий гидросамолет «Petrel» (Буревестник). Суть проекта — превращение реактивного сверхзвукового гидросамолета компании «Martin» P6M «Seamaster» в ныряющий. Цель проекта — создание высокомобильной платформы для запуска двух мощных ракет стратегического назначения (Нighly mobile strategic missile platform). Длина самолета — 12,8 м. Размах крыльев — 13,17 м. Высота — 3,51 м.
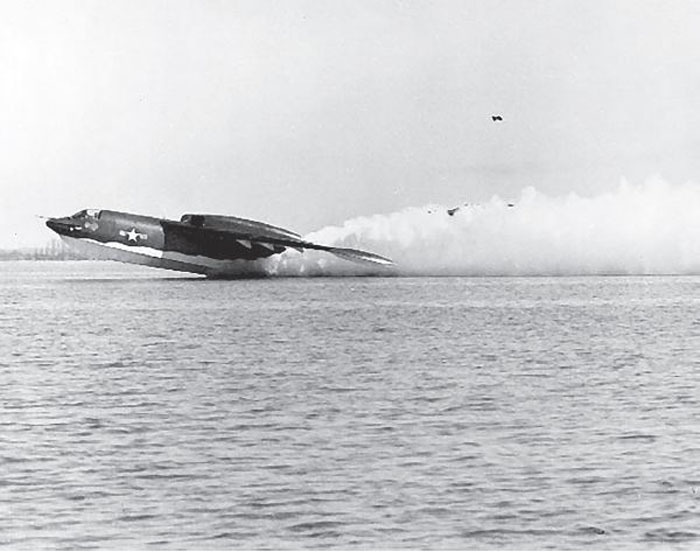
Взлет летающей лодки «Sea Master»
В объяснительной записке к проекту сказано, что такому самолёту не надо постоянно патрулировать в море, подобно ракетной АПЛ. В случае необходимости он быстро доберется по воздуху в заданный район и осуществит боевой пуск ракеты. А в случае угрозы со стороны вражеской авиации или ПВО погрузится под воду и атакует оттуда.
Кроме того, этот самолет способен уничтожать АПЛ противника. Соответственно, конструкторы предусмотрели два варианта вооружения.
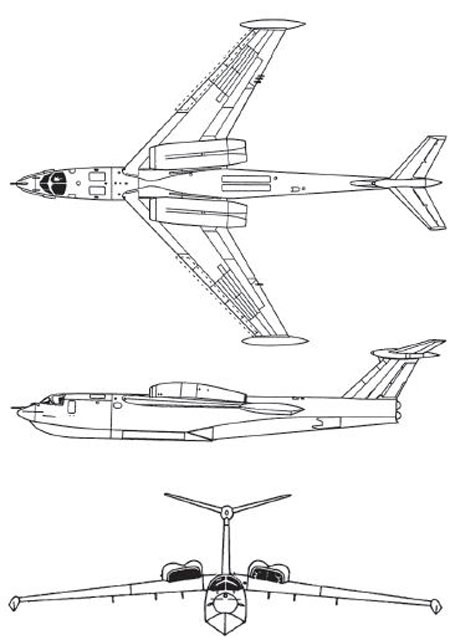
Самолет «Sea Master» в трех проекциях
Вариант А. Ракеты «Polaris» с ядерными боеголовками, размещенные в транспортно-пусковых контейнерах по бокам фюзеляжа. Они могут быть запущены как во время полета, так и из подводного положения. В полёте их пуск обеспечивается при помощи вытяжного парашюта. В подводном состоянии выпускается весь контейнер, имеющий положительную плавучесть, пуск производится после его всплытия (в вертикальном положении) на поверхность моря.
Вариант Б. Две противолодочные ракето-торпеды UUM-44 «SUBROC», тоже с ядерными боеголовками. Кроме того, машина имела для самообороны 4 ракеты класса «воздух-воздух» AIM-54 «Phoenix» (каждая в отдельном контейнере под кабиной пилотов)*.
* Длина ракеты «Polaris» A1 образца 1960 г. 868 см, диаметр 137 см, масса 13 тонн, дальность 2160 км. Длина ракето-торпеды «Subrock» 670 см, диаметр 53 см, масса 1,8 тонны, дальность 55 км. Боевая часть — ядерная глубинная бомба W55. Длина ракеты «Phoenix» 390 см, диаметр корпуса 38 см, дальность до 100 км, боевая часть содержит 60,3 кг ВВ.
Проектбылпредставленна12-йконференции«Annual meeting and technical display of AIAA» в1976 году*.
* AIAA — American Institute of Aeronautics and Astronautics.
Присутствовавшие на конференции офицеры флота рекомендовали его для дальнейшей проработки. И на этом всё кончилось.
Использование редана
Надо попутно отметить, что в проектах НЛА компании «Lockheed», НЛА «Petrel» и уменьшенной машины в проекте компании «Convair» использовался редан.
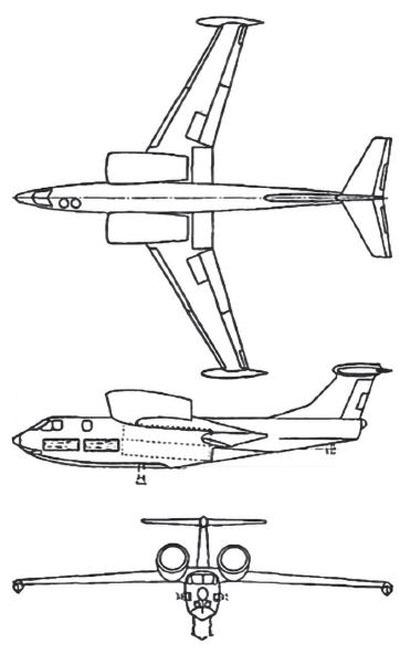
ЛПЛ «Petrel» в трех проекциях
Дело в том, что отрыв гидросамолета типа «лодка» от воды при взлёте затруднен тем, что кроме силы сопротивления воды движению лодки, между её днищем и водой действуют ещё и силы сцепления (подсасывания), особенно в задней части лодки. Назначение редана — cвести до минимума подсасывающее действие воды при разбеге путем уменьшения смачиваемой части днища и тем самым облегчить отрыв летающей лодки от воды.
Аппараты КБ им. Бериева
Согласно непроверенной устной информации, полученной автором, во второй половине 1980-х гг. небольшая группа конструкторов авиацентра имени Г.М. Бериева в Таганроге разрабатывала несколько предэскизных проектов ныряющих самолетов.
Три варианта расположения двигателей. Сверху вниз: Бе-10, Бе-12, Бе-200
Эти гибриды предназначались (как и американские аналоги) для уничтожения атомных и дизель-электрических подводных лодок стран НАТО при помощи самонаводящихся торпед или комбинированных ракето-торпед*.
* В СССР были приняты на вооружение ракето-торпеды «Вьюга» (1969 г.), «Метель» (1973 г.), «Водопад» (1981 г.), «Ветер» (1984 г.)
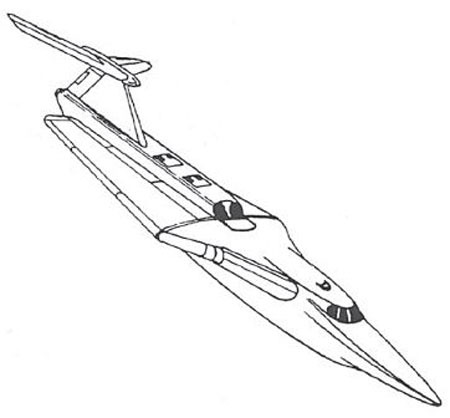
Ныряющий самолет КБ Бериева. Двигатели расположены поверх фюзеляжа, крылья складываются вдоль него
В ходе предварительной проработки конструкторы решали следующие задачи:
Определяли оптимальное размещение реактивных двигателей (по бокам фюзеляжа, поверх крыла, перед хвостовым оперением);
Выясняли особенности погружения самолета прямым пикированием в воду;
Рассматривали возможность скоростного движения самолета под водой в воздушном пузыре (как у реактивной торпеды «Шквал»).
Но для прорыва в неизведанную область требовалось серьезное финансирование и много времени, а времена наступили неподходящие. «Союз нерушимый республик свободных» стремительно приближался к распаду на национальные квартиры, военная техника потоком шла в мартеновские печи на переплавку.
Между тем, разработка торпеды «Шквал» в НИИ-24 заняла 17 лет: начали в октябре 1960 г., приняли на вооружение в ноябре 1977 г. А тут пилотируемый самолет, машина намного более сложная. Поэтому не удивительно, что «нарисовать» более или менее реальную машину, интересную морской авиации, «бериевцам» не удалось.
Фиктивные проекты
В 1965 г. в американской прессе были опубликованы сообщения о проекте «Аэрошипа», сопровождаемые иллюстрациями. А в 1966 г. автор статьи во французском журнале «Science et Vie» (Наука и жизнь) в материале, посвящённом американскому проекту, заявил, что компания «Dassault» разрабатывает аналогичный проект на базе своего истребителя-бомбардировщика «Mirage IIIА».
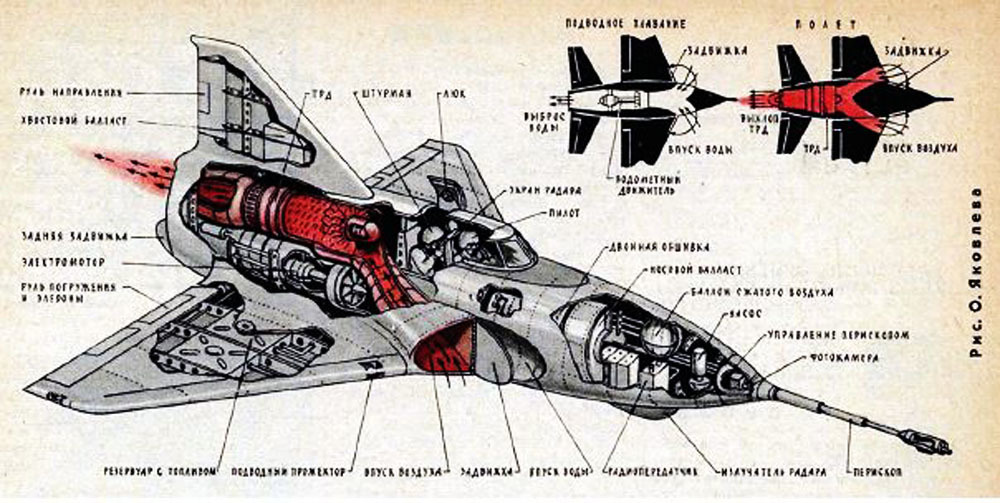
Якобы это «Коммандер-2» Д. Рейда. Но такой машины не было даже в проекте.
Это фантазия французов на основе истребителя «Мираж-IIIA»
Статью сопровождало изображение этого НЛА с обозначением его составных частей. В 1966–69 гг. несколько научно-популярных журналов, в т.ч. советские «Юный техник» (№ 10/1969) и «Техника — Молодежи» (№ 6/1970) опубликовали варианты одного и того же рисунка, показывающего ныряющий истребитель в разрезе. При этом автором проекта называли... Брюса Рейда, сына Дональда, а нарисованную машину — летающей подводной лодкой «RFS-2» (или «Commander-2»)!
В интернете можно найти много изображений такого рода. Некоторые из них выглядят вполне правдоподобно. Например, в 2020 г. анонимный автор разместил в интернете изображения спроектированного им ныряющего самолета.
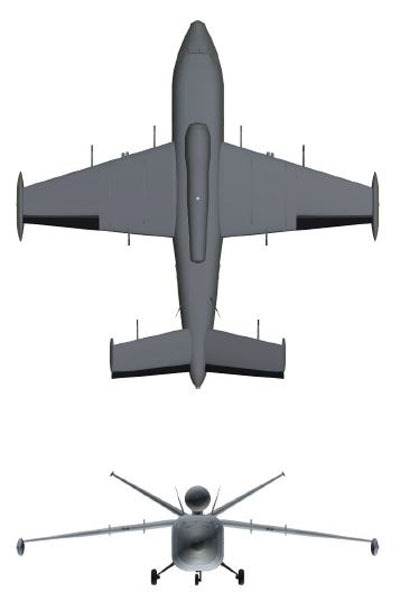
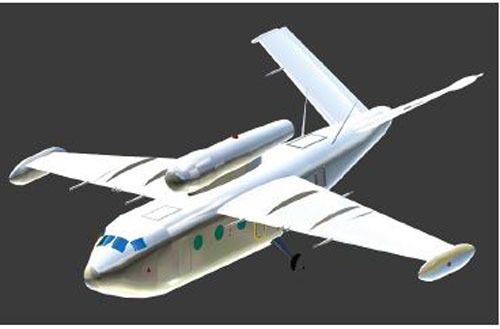
Фантастический проект ныряющего самолета, опубликованный в 2020 г. в интернете
Он даже привел характеристики этой машины: Длина самолета 12,4 м; размах крыльев 12,2 м; площадь крыльев 60,9 кв. м; высота 5,1 м; вес пустой машины 4728 кг; взлетный вес 6550 кг, соотношение мощности двигателя и веса самолета 1,167; нагрузка на крыло 107,6 кг/кв. м.
Однако правда жизни сурова: в мире по сей день не было и нет ни одного реализованного проекта пилотируемого ныряющего самолета кроме RFS-1 Дональда Рейда!
Глава 6
НЫРЯЮЩИЕ САМОЛЕТЫ В XXI ВЕКЕ
В период с 1971 по 1999 гг. в мире было сделано много нового в таких областях прикладной науки как материаловедение, аккумуляция электроэнергии, топливные смеси для авиационных и ракетных двигателей, микроэлектроника и компьютерная техника. Благодаря этому в 2000–2014 гг. появились несколько новых проектов ныряющих летательных аппаратов.
Концепция Г. Хокса (2000)
Начнем с англичанина Грэма Хокса (Graham Hawkes; 1947 г.р.), переселившегося в 1980-е годы в США, в Сан-Франциско.
СПРАВКА
Г. Хокс родился и вырос в Лондоне, получил профессию инженера- судостроителя.
В 1976 г. совместно с компанией OSEL из Грейт-Ярмута (Great Yarmouth) в графстве Норфолк (Великобритания) 29-летний Хокс разработал жесткий скафандр «Wasp» для глубоководного погружения.
В 1978 г. он спроектировал одноместный погружаемый аппарат «Mantis» с дистанционными манипуляторами. Этот аппарат был использован в фильме студии «Pinewood» о Джеймсе Бонде «Только для твоих глаз» (1981 г.). Хокс сам управлял им во время киносъёмок в 1980 г.
В 1981 г. Хокс спроектировал первый в серии одно- и двухместных подводных аппаратов «Deep Rover».
В том же году он вместе с Сильвией Эрл (Sylvia Earle) основал компанию «Deep Ocean Technology» (DOT). А в 1982 г. вместе с ней основал фирму «Deep Ocean Engineering» (DOE) в Сан-Леандро (штат Калифорния). Компания построила более 300 аппаратов типа «Deep Rover»!
В том же 1982 г. Хокс построил подводный аппарат «Challenger» (“Претендент”), способный погружаться на большие глубины — до 1500 м.
В 1985 г. компания «DOE» построила глубоководный исследовательский подводный аппарат «Deep Rover». Рекордное погружение на 910 м состоялось неподалеку от острова Сан-Клементе (San Clemente). Аппарат спустили в воду с судна «Egabrag III», пилотом был сам Хокс. Глубина спуска фиксировалась через каждые 100 м.

Самый известный «подводный самолет» Г. Хокса – двухместный аккумуляторный «SuperFalcon». Длина 6,4 м, размах крыла 2,74 м, вес 1816 кг. Опускается на глубину 1000 футов (305 м) и проплывает 25 миль (46,3 км).
Его стоимость 1,7 млн долларов
В 1998 г. Хокс завершил проект двухместного аппарата «Deep Flight II». В 2000 г. он построил «DeepFlight Aviator», тоже с положительной плавучестью и крыльями. Первый серийный экземпляр этого типа был назван «Spirit of Patrick».
В 2008 г. Хокс построил первый аппарат «Deep Flight Super Falcon», который затем продал миллиардеру Тому Перкинсу. а в 2010 г. миллиардер Ричард Брэнсон купил первый образец аппарата «Deep Flight Merlin» и дал ему название «Necker Nymph». Это мини-лодка с положительной плавучестью и крыльями относится к «мокрому типу»: пилот находится в кабине, заполненной водой и использует акваланг.

Подводный самолет «Black Hawk» Г. Хокса (2014 г.)
В 2014 г. Хокс спроектировал и построил спортивную подводную лодку «Black Hawk» с крыльями. Аппарат длиной 17 футов (5,18 м) оснащен прозрачным акриловым фонарем для пилота и светодиодными фарами в носовой части.
Он изготовлен из композитного материала и весит около 1270 кг. Его аккумуляторные батареи обеспечивают несколько часов плавания и до 24 часов жизнеобеспечения.
Размах крыльев 6 футов (183 см), под ними установлены два электромотора. Основные крылья дополнены более короткими крыльями в хвостовой части — для создания обратной подъемной силы. Аппарат способен выполнять под водой фигуры высшего пилотажа. Управляемый при помощи джойстика, «Black Hawk» делает бочку, мертвую петлю и даже выпрыгивает из воды как дельфин.
Хокс говорит, что «Черный ястреб» способен достигать «края тьмы», глубина которого в большинстве районов океана составляет не менее 1000 футов. Всего его компания построила 3 экземпляра «ястребов» по 1,35 млн долларов каждый.
В 2000 г. Хокс рассказал корреспонденту журнала «New Scientist», как он попытался решить ключевые проблемы, связанные с созданием самолета, способного двигаться в двух средах — или, другими словами, НЛА. Тогда он был настроен весьма оптимистично, ссылаясь на достижения в области легких композитных материалов из углеродного волокна и энергоемких электробатарей.
Хокс говорил: "Уже нет причин, по которым это невозможно сделать".
По его мнению, конструкция «Аэрошипа» компании «Convair » была удачной.
Отказ от громоздких поплавков сделал НЛА достаточно лёгким как в воздухе, так и в воде. Но какой способ погружения оптимальный? Одним из решений является простое затопление фюзеляжа водой, но при этом экипажу придется использовать водолазное снаряжение и тяжелые баллоны со сжатым воздухом.
Поэтому лучше поместить экипаж в водонепроницаемую кабину. А для противодействия её плавучести можно заимствовать еще одну идею из конструкции «Аэрошипа» — топливные баки в виде резиновых баллонов. Тогда аппарат можно погрузить в воду, пустив воду в пустоты, освобожденные топливом, использованным во время полета.
Для всплытия воду нетрудно откачать насосами. Для движения под водой лучший вариант — электроэнергия.
Правда, тут есть одно «но»:
Использование аккумуляторов для привода электродвигателей под водой поможет противодействовать плавучести НЛА. Но, к сожалению, батареи могут серьезно подорвать его пригодность к полету.
В то же время невозможно построить самолет, который будет погружаться под воду точно так же, как подводная лодка. Вы смешиваете два принципиально разных режима работы.
И Грэм Хокс нашел оригинальное решение этой проблемы: он начал строить подводные лодки с положительной плавучестью — сначала в виде действующих макетов. Чтобы преодолеть эту плавучесть и удерживать мини-субмарины на некоторой глубине, Хокс оснащал их крыльями, которые направляют «подъемную силу» вниз:
Думайте об этом как о полёте под водой. Чтобы летать как под волнами, так и над ними, крылья должны быть немного необычными. Важно то, что крыльям погружаемого аппарата требуется симметричный аэродинамический профиль, в отличие от асимметрично изогнутого крыла, которое обеспечивает подъемную силу самолета*.
* Журнал «New Scientist», 12 февраля2000 г., с. 36.
Когда аппарат находится в воздухе, крылу требуется положительный «угол атаки»: другими словами, оно должно быть отклонено вверх относительно воздушного потока. Для этого аппарату надо лететь с приподнятым носом. И наоборот, под водой ему требуется отрицательный угол атаки, поэтому он должен двигаться немного носом вниз.
На такую мысль Хокса натолкнули ныряющие морские птицы:
Придется опустить нос и буквально нырнуть в воду с сильным всплеском подобно олуше или кайре.
Затем Хокс построил полномасштабный погружаемый аппарат с короткими крыльями «Super Falcon», который, по расчетам, на небольшой глубине может развивать скорость до 10 узлов (18,5 км/час) и способен опускаться на глубину до 300 метров!
По мнению Хокса, если оснастить такой аппарат авиационными реактивными двигателями и более длинными крыльями, он сможет летать в воздухе со скоростью до 900 км/час!
Важно то, что на этих очень разных скоростях характеристики потоков воздуха и воды, обтекающих движущийся аппарат, и определяемые параметром, известным как число Рейнольдса (Reynolds number), примерно одинаковы, поэтому крылья и рулевые плоскости аппарата должны хорошо работать в обеих средах.
Хокс признал, что для того, чтобы поднять «Super Falcon» в воздух, требуется очень много энергии, и с этой задачей могут справиться только реактивные двигатели. С ним согласился Норман Полмар, консультант правительства США по вопросам военно-морского флота. Он отметил, что поршневые двигатели, обычно используемые в легких самолетах, исключены по очень простой причине: они выйдут из строя, если в цилиндры попадет вода. Полмар сказал:
"Вы не можете погрузить поршневой двигатель в воду и ожидать, что он заработает. Но защитите реактивный двигатель от коррозии в солёной воде и расположите его высоко на гидросамолете, чтобы брызги не попадали в воздухозаборник во время взлета и посадки, и тогда он будет работать нормально. Российский авиаконструктор Бериев доказал это своим самолетом-амфибией Бе-200".
Хокс предсказал, что реактивные двигатели будут играть двойную роль, двигая самолет как в воде, так и в воздухе. По его мнению, нет причин, по которым лопатки компрессора и турбины реактивного двигателя не могут приводиться в движение электромотором для создания тяги под водой. Вполне возможно построить двигатель, который в полёте будет работать на керосине как воздушно-реактивный, а при погружении в воду переключаться на электричество и работать как водомёт.
В этой связи Хокс напомнил, что у большинства реактивных двигателей есть электростартер, и его можно приспособить для вращения вала турбины под водой. Он понимал, что в воде лопасти будут вращаться намного медленнее, чем в воздухе, однако важно то, что субмарина будет плыть.
Действительно, в 2007 г. производитель самолетов «Airbus» запатентовал гибридный электрореактивный двигатель для авиалайнеров, который может работать на авиационном керосине и на электричестве.
Однако схеме Хокса по использованию обычного реактивного двигателя для движения в двух средах (в воздухе и воде) препятствует очень большой камень. Об этом предупредил инженер Джим Маккенна (JimMcKenna) из Управления гражданской авиации Великобритании, который исследовал специфику погружения авиационных двигателей:
"Нельзя допускать попадания холодной морской воды на горячий двигатель, потому что тепловой удар разорвет его на части. Охлаждение реактивного двигателя занимает очень много времени, поскольку турбина работает при температуре между 500 и 600 °C."
То есть пока не найдено решение проблемы быстрого охлаждения реактивного двигателя, ныряющему самолету придется часами ждать на поверхности, прежде чем он сможет погрузиться.
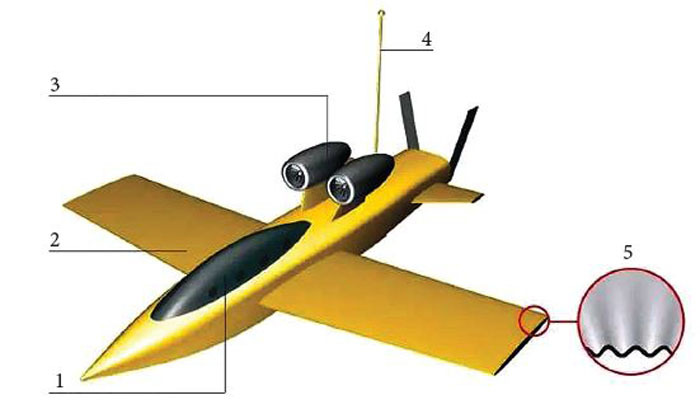
1) Водонепроницаемая кабина (отсек) для пилотов и пассажиров; 2) гибкие крылья; 3) гибридные реактивные турбины, способные работать в воздухе и воде; 4) выдвижное устройство для подачи воздуха к турбинам (или к топливным элементам) в подводном положении аппарата; 5) профиль гибких законцовок крыльев
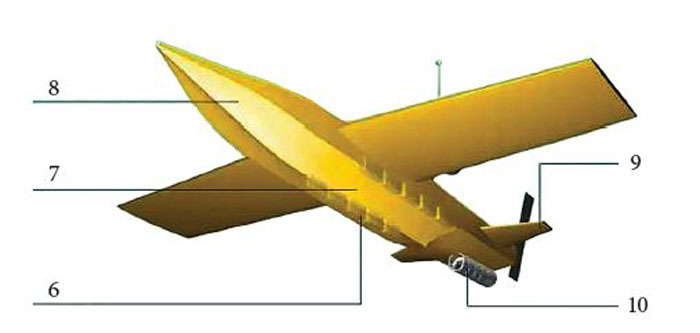
6) топливные элементы; 7) фюзеляж композитной конструкции; 8) топливные баки и фюзеляж частично наполняются забортной водой для регулировки плавучести; 9) тангаж; 10) выдвижной гребной винт для движения под водой
Судя по тому, что Хокс не построил ныряющий летательный аппарат, решить эту проблему ему не удалось. Он пошел по другому пути: развернул строительство по заказам богачей двухместных и одноместных прогулочных подводных лодок нового типа, обладающими положительной плавучестью и оснащенных крыльями. Их называют «подводными самолетами» (submarine planes). В настоящее время они очень популярны среди тех, кто способен платить более миллиона долларов за игрушки для себя, любимых.
И хотя с момента изложения Хоксом своей идеи прошло уже 25 лет, не слышно, чтобы кто-нибудь построил самолет с крыльями, изменяющими угол атаки для пикирования с неба под воду.
Инициатива DARPA
В начале октября 2008 г. агентство перспективных исследований Министерства обороны США (DARPA) опубликовало заявление, имевшее три любопытных аспекта.
Во-первых, в нём были признаны неудачными все предыдущие проекты летающей подводной лодки (flying submarine):
Предыдущие попытки продемонстрировать аппарат, обладающий качествами как подводной лодки, так и самолета, искали способы наделить летными возможностями платформы, наиболее подходящие для подводных операций. Эти попытки не увенчались успехом, во многом потому, что требования к конструкции подводной лодки и самолета диаметрально противоположны.
Во-вторых, DARPA обратилось к инженерному сообществу США с просьбой спроектировать самолет, погружающийся в воду. Агентство заявило, что с 1 декабря 2008 г. ждет поступления проектов с «реалистично обоснованным бюджетом», а также с перечнем экспериментов, нужных для реализации проекта.
В-третьих, были изложены основные требования к проекту.
Агентство ожидает, что проект представит десантную машину скрытного действия со специфическими возможностями самолета, надводного корабля и подводного судна, что значительно повысит тактические возможности флота Соединенных Штатов. [...] Проект должен решить проблемы в области конструктивного проектирования двигателя, обладающего эффективной тягой в режимах с двумя потоками (воздуха и воды), а также управляющих поверхностей, работающих в двух средах.
Агентство хотело получить самолет, способный без дополнительной заправки топливом преодолеть 1224 морские мили (2267 км). Это расстояние складывается из 1000 миль (1850 км) в полёте на высоте 500–2500 футов (152–762 м), 200 миль (370 км) в бреющем полёте над самой водой или в плавании по воде, и 24 мили (44,5 км) под водой. При этом 1112 миль (с вычетом 100 миль бреющего полета и 12 миль под водой) необходимо преодолевать максимум за 8 часов.
Самолет должен брать на борт 8 человек (двое пилотов, шесть бойцов спецназа и/или операторов спецоборудования). Плюс к ним 2000 фунтов (908 кг) полезного груза.
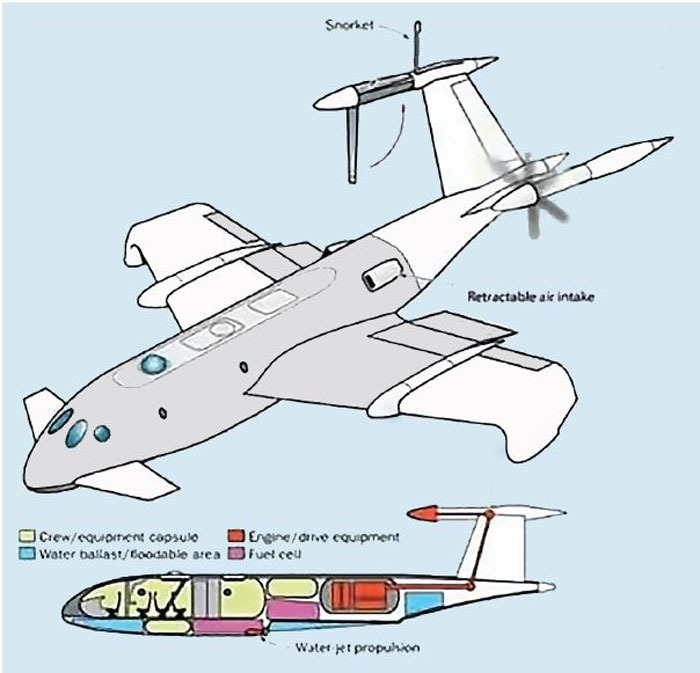
Ныряющий самолет DARPA. Рисунок из журнала «Flight International» не имеет ничего общего с каким-либо конкретным проектом
Надо обеспечить подачу атмосферного воздуха в двигатели самолета, плывущего на глубине не более 8 метров, через специальное устройство («шноркель»)*.
* Немецкое слово «schnorkel» (завиток) — условное обозначение устройства, подающего воздух из атмосферы к дизель-моторам подводной лодки, идущей на перископной глубине. В России его называют РДП.
Самолет должен иметь возможность находиться под водой без движения 72 часа и сохранить способность к взлету и полету по истечении этого времени.
Благодаря тому, что DARPA потребовало спроектировать именно самолет, способный погружаться лишь на небольшую глубину, проектировщики могли значительно снизить требования к статической и динамической нагрузке на машину в погруженном положении.
Благодаря такой концепции стала возможной практическая реализация идеи ныряющего самолета.
Здесь уместно сказать, что в декабре того же года британский журнал «Flight International» опубликовал статью, посвященную инициативе DARPA, которую сопроводил цветным рисунком погружающегося самолета (submersible aircraft)*.
* «Flight International» — самый старый авиационный журнал в мире. Издается с 1909 г.
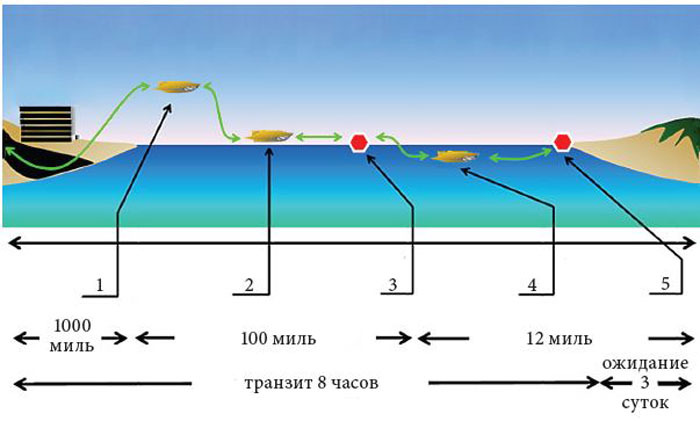
1) Старт с наземного аэродрома и полет на расстояние до 1850 км; 2) бреющий полет над водой 150–185 км; 3) в 20–25 км от берега самолет погрузится в воду; 4) высадка на берег спецгруппы и ожидание в подводном положении до 3-х суток ее возвращения, время от времени выдвигая на поверхность перископ и трубу воздухозаборника; 5) прием группы на борт, удаление на безопасное расстояние от берега, взлёт и возвращение на базу (мили указаны морские)
Рисунок получил широкое распространение в интернете. Однако он является выдумкой художника журнала и не имеет отношения ни к одному реальному проекту!
Проект «Sail Fish» (2009)
В январе 2009 г. группа в составе четверых студентов и профессора Дэниела Б. Колти (Daniel B. Coltey) из университета в Оберне (Auburn university), что в штате Алабама, представила публикацию под названием «Концептуальный проект подводного тактического десантного самолета».
[...] Главная цель проектирования... создание проекта подводного самолета — осуществляется отчасти в ответ на запрос Агентства перспективных оборонных исследовательских проектов (DARPA).
Проектировщики подсчитали, что ионно-литиевые аккумуляторные батареи, необходимые для ныряющего летательного аппарата, способного пройти под водой 44 км (22 морские мили), будут весить столько же, сколько все остальные компоненты аппарата вместе взятые, что сделает такой НЛА слишком тяжелым для полета*.
* В 1953 г. французский физик Андре создал первый образец серебряно-цинкового аккумулятора (СЦА). Но у этого новаторского прибора был существенный недостаток. Электрод из цинка, установленный в нем, довольно быстро растворялся. Через 5 лет (в 1948 г.) Андре нашел способ создания батареи, в которой цинковые электроды не растворяются. В СЦА анодом служит пластина из оксида серебра, а катодом пластины из окиси цинка и цинкового порошка. Электролит — едкий калий, растворенный в воде в определенной концентрации. Серебряный положительный электрод помещен в конверт из прочного лозного материала, не пропускающего электролит. Он защищает электрод от активной щелочной среды. СЦА намного эффективнее и удобнее свинцово-кислотных аккумуляторов. Но при этом они намного дороже. Поэтому главная область их применения — военная техника. Первые ионные аккумуляторы создали англичанин Майкл С. Уиттингем (1970) и американец Джон Гуденаф (1980). Но у них были три серьезных недостатка: низкое напряжение (2–4 В), высокая цена и склонность к самовозгоранию. Наконец, в 1991 г. японец Акира Ёсино изобрел аккумулятор с анодом из графита и катодом из кобальтата лития. Он стал практичным и безопасным.
Поэтому они решили вместо аккумуляторов использовать газовую турбину. По их мнению, турбовальный агрегат, оснащенный большими лопастями несущего винта и шестернями для регулировки скорости, обеспечит «приемлемую эффективность» как в воздухе, так и в воде.
Проект «Sail Fish»
А воздух в турбину погруженного самолета будет поступать через 10-метровую трубу (шноркель), выдвинутую из моря. При этом НЛА останется близко к поверхности воды. Но ограничение глубины не имеет особого значения. Боб Оллвуд (Bob Allwood), исполнительный директор Общества подводных технологий в Лондоне, сказал:
"Пока её [трубу] не видит противник, нет особой причины нырять глубоко".
К сожалению, в интернете нет ни одной схемы этого «концептуального проекта». В своей публикации они не указали ни размеры своего ныряющего самолета, ни его тактико-технические характеристики.
Приведенный здесь рисунок даёт лишь приблизительное представление о том, как он должен был выглядеть.
Проект «Carderock» (2010)
В 2008–2010 гг. специалисты Центра надводных боевых действий флота (Naval Surface Warfare Center — NSWC) «Carderock» (в штате Мэриленд) разработали проект «ныряющего самолета», исходя из требований DARPA. В нём они сформулировали круг задач и проблем, характерных для подобных проектов, а также предложили два варианта их решения на основе имеющихся технологий.
Целью работы было определение возможности создания пилотируемого погружающегося самолета, способного взлететь с поверхности моря, преодолеть 640 км по воздуху и пройти 12 морских миль (22,2 км) под водой, после чего высадить группу боевых пловцов. А затем взять на борт вернувшуюся группу, снова пройти 12 миль под водой, потом взлететь и пролетев ещё 640 км вернуться в исходную точку.
Конструкторы сочли оптимальной компоновку типа «летающее крыло» с выступающим из него фюзеляжем большего объема, стреловидной передней кромкой крыла и двигателями на его верхней и нижней поверхностях. В крыле находятся баки и цистерны различного назначения, а также своеобразные понтоны плавучести в его нижней части, в фюзеляже — герметичная кабина для двух-трех пилотов и грузопассажирский отсек (6 пассажиров) в верхней части, понтон внизу. При взлёте и посадке используются гидролыжи.
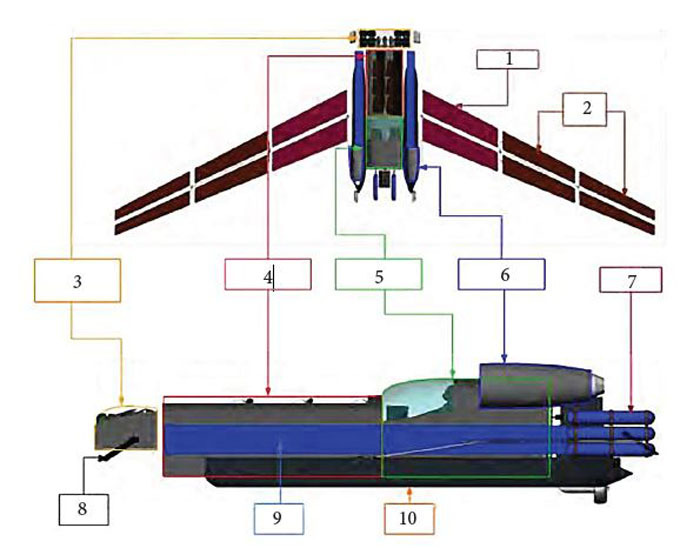
Общая компоновка аппарата NSWC «Carderock» 1 — топливные баки; 2 — балластные цистерны; 3 — снаряжение спецназа; 4 — отсек для бойцов спецназа; 5 — кабина пилотов; 6 — турбовентиляторные двигатели; 7 — пневматическая система; 8 — устройство для швартовки; 9 — аккумуляторы; 10 — подушка плавучести
Силовая установка состоит из двух турбовентиляторных двигателей для полёта и винто-рулевой колонки с электромотором для плавания на поверхности воды и под водой.
Внутри фюзеляжа и крыла размещены кабина для 2-х пилотов и отсек для 6 десантников. Инженеры NSWC «Carderock» разработали два варианта НЛА.
Вариант 1
Размах крыла: 28,04 м. Длина: 10,97 м. Взлетный вес: 16798 кг. Полезный груз: 340,5 кг. Крейсерская скорость: 320 км/ч. Подводная скорость: 6 узлов (11,1 км/ч).

Вариант 1
Вариант 2
Размах крыла: 33,22 м. Длина: 10,36 м. Взлетный вес: 17 706 кг. Полезный груз: 340,5 кг. Крейсерская скорость: 320 км/ч. Подводная скорость: 6 узлов (11,1 км/ч).

Вариант 2
Во втором варианте размах крыла больше на 518 см, при этом его длина меньше на 61 см, и он тяжелее на 908 кг. Другие характеристики совпадают.
Разработчики построили несколько масштабных моделей. На них они проверили различные способы взлёта и посадки, а также погружения и работы на небольших глубинах. Для перехода из одной среды в другую удалось найти оптимальные инженерные решения.
По результатам проведенной работы конструкторы сделали вывод о принципиальной возможности создания на основе имеющихся технологий грузопассажирского погружающегося самолета, полностью соответствующего требованиям Агентства перспективных исследований.
Но и эта разработка не получила развития в реальных проектах. Правда, ходили слухи о секретном продолжении опытноконструкторских работ, но за 15 прошедших лет такая машина на летных испытаниях не появилась.
Проект QFS-20 (2014)
В 2014 г. Сиддалл и Ковач (Siddall & Kovač) из Имперского военного колледжа (Великобритания) опубликовали в «The Journal of Bioinspiration & Biomimetics» статью, посвященную бионическому проекту водно-воздушной беспилотной платформы. Чисто внешне их проект похож на разработку центра «Кардерок ».
Они теоретически разработали конструкцию ныряющего летательного аппарата на основе новейших доступных технологий. Он предназначен для того, чтобы преодолевать в полёте расстояние от точки старта до места проведения операции, что резко сокращает общее время движения по сравнению с водным транспортом.
В зоне операции QFS-20 (Quick flying squid — «скоростной кальмар 2020 года») входит в воду, чтобы сохранить скрытность, а когда операция завершена, взлетает и летит назад к месту старта.
Используя метод бионического проектирования, Сиддал и Ковач предложили ключевые принципы создания воздушно-водных аппаратов такого типа:
1) погружение в воду пикированием, подобно тому, как это делают ныряющие птицы;
2) складывание крыльев вдоль корпуса, как у таких птиц, для эффективности погружения;
3) использование водометных движителей по принципу движения кальмара;
4) применение гидрофобных покрытий корпуса и крыльев для отталкивания воды, чтобы они в момент взлёта были сухими — как туловище и перья ныряющих птиц.
Был построен крошечный экспериментальный водомётный движитель для демонстрации возможностей подобной конструкции. Масса этого механизма составила 2,6 грамма, длина — 6,57 см. Он мог подниматься на высоту 4,8 м, что в 72 раза превысило его длину.
Следовательно, такой двигательный механизм обладает высокой удельной мощностью. Этот факт открывает перспективы применения водомёта пилотируемыми и беспилотными летательными аппаратами, способными работать в воде и в воздухе (Aqua UAVs), а также другими бионическими плавающими и прыгающими по воде роботами.
Суть проекта
QFS-20 — это аппарат с реактивным двигателем для полёта и двумя водомётами (или гребными винтами) для подводного плавания.
Обеспечение возможности работы в двух средах является большой проблемой при проектировании НЛА. Решение её в этом проекте включает в себя применение следующих решений:
1. Использование гидрофобных (несмачиваемых) покрытий всех наружных частей НЛА, что значительно уменьшает прилипание воды к ним;
2. Герметизация крышек впускных и выпускных отверстий;
3. Использование водомётов как наиболее эффективных подводных движителей;
4. Применение ракетных ускорителей для увеличения скорости НЛА при его взлёте из-под воды.
Наиболее важными компонентами QFS-20 являются три системы: реактивный двигатель, подводный двигатель и корпус в виде крыла с утолщениями.
Двигатели. Система реактивного двигателя включает в себя один реактивный двигатель, два воздухозаборника с крышками и два выпускных сопла, тоже с крышками. Чтобы избежать попадания воды из воздухозаборников в реактивный двигатель, крышки закрывают входные отверстия, пока QFS-20 находится под водой. А когда он находится в воздухе, крышки открыты.
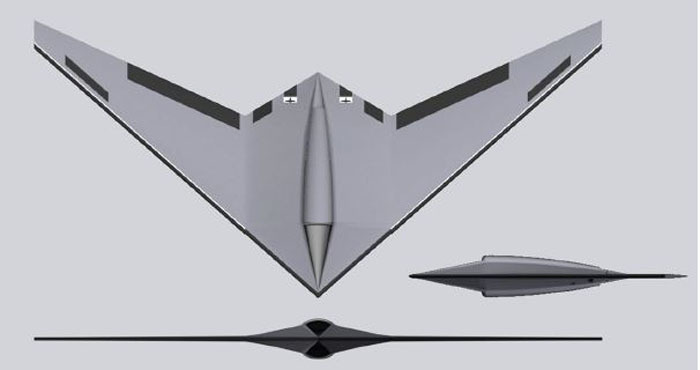
НЛА QFS-20 (вид сверху, спереди, сбоку)
Система подводного двигателя включает в себя топливный бак, бак со сжатым воздухом, трубу подачи топлива, трубу подачи воздуха, сам двигатель, гребной вал, гребной винт, подводный лифт, выхлопной канал двигателя. Воздушный трубопровод подает окислитель к подводному двигателю, а топливный провод — горючее к нему. Эта система позволяет аппарату плыть под водой. При этом рули глубины за каждым винтом позволяют ему изменять глубину погружения быстрее, чем рули на крыле.
Подводный двигатель вращает гребной вал, вал вращает гребной винт. Пока двигатель сжигает топливо, он также производит газ, который выходит через выхлопную трубу.

Ускорители. Это две небольшие ракеты на твердом топливе. Поскольку НЛА должен развить высокую скорость под водой, чтобы создать подъемную силу в момент выхода из воды, а подводный двигатель не способен развить нужную скорость, уско- рители помогут НЛА достичь необходимой скорости.
Когда аппарат выйдет на поверхность воды и реактивный двигатель начнет работать, ускорители будут несколько секунд поддерживать определенную скорость, чтобы обеспечить подъемную силу, пока реактивный двигатель не создаст тягу.
Корпус. В корпусе НЛА размещены компьютер, приборы и механизмы управления, антенны, датчики и т.д. У QFS-20 имеется автопилот, подключенный к искусственному интеллекту (ИИ). ИИ получает информацию от всех датчиков, сверяет её с заложенной программой рейса «туда и обратно» и мгновенно определяет, есть ли проблема в какой-либо части аппарата или системе, и сам решает, что нужно делать.

На рисунке показан воздухозаборник реактивного двигателя,а также двигатель подводного хода
Передняя кромка крыла имеет острый угол, чтобы минимизировать воздействие воды на поверхность во время входа. Без острого угла удар о поверхность вода мог бы повредить эту переднюю кромку, что создало бы серьёзную проблему.
Когда QFS-20 выходит из воды, его скорости недостаточно для создания нужной подъемной силы, возникает опасность сваливания. Поэтому предкрылок передней кромки опускается, чтобы аппарат смог создать достаточную подъемную силу и взлететь.
Когда разделенные рули направления заблокированы в нулевом положении, рысканье значительно уменьшается и поворот может быть недоступен. Поэтому курс для входа в воду следует устанавливать до снижения высоты и блокировать раздельный руль направления для входа в воду.
Первым коснется поверхности воды носовая часть аппарата. При ударе носа о поверхность воды он испытает сильный удар, скорость НЛА уменьшится, фактически произойдут несколько ударов на быстро уменьшающейся скорости. В итоге НЛА полностью войдет в воду.
Когда QFS-20 находится в положении входа в воду, расстояние от него до водной поверхности небольшое, поверхности управления находятся в опасности, предел положений элевонов составляет –30°+30°, а предел положений раздельных рулей направления составляет 0–60. Это предполагают, что рули направления с разделенным сопротивлением подвергаются большей опасности, поэтому их следует установить на 0 (нулевой) градус, чтобы не потерять их в момент входа в воду.
• • •
Процесс полета и подводного плавания включает 4 акта: полет, вход в воду, подводное путешествие, выход из воды.
Полет — начало и конец процесса, он начинается со взлёта и заканчивается снижением скорости и высоты для входа в воду.
Вход в воду начинается со снижения высоты полёта и заканчивается полным входом аппарата в воду. Одной из важных особенностей QFS-20 является прямой вход в воду и выход из нее (полет-ныряние — как у птиц), без посадки на поверхность воды с последующим погружением (полет-посадка-погружение-плавание).
При приближении к поверхности воды аппарат снижает скорость до скорости сваливания и запускает водометы.
Подводное плавание включает в себя все манёвры под водой, а водометы создают тягу для перемещения. Продолжительность пребывания под водой зависит от ряда факторов: цели, глубины плавания, количества топлива, предельной величины давления, на которое рассчитан корпус аппарата.
При выходе из воды аппарат выходит напрямую вместо того, чтобы сначала всплыть на поверхность воды, затем разогнаться и взлететь (последовательность «вода-поверхность воды-разгон-полёт»). Выход начинается со всплытия для преодоления короткого расстояния до поверхности воды, водометы работают на максимальной мощности при поддержке ускорителей взлета. При достижении необходимой скорости для выхода из воды передний предкрылок опускается вниз.
После выхода крышка входного отверстия для воды закроется и начнет работать реактивный двигатель.
«Концептуальный проект» предусматривал два варианта реализации: а) создание крупного беспилотника; б) создание пилотируемой машины. Несмотря на это, бионический проект Сиддала и Ковача поначалу не вызвал особого интереса на флотах. Его использовали только производители пластиковых моделей для склейки в домашних условиях.
Глава 7
ЛЕТАЮЩИЕ ДРОНЫ ДЛЯ ПОДВОДНЫХ ЛОДОК
Войны в Нагорном Карабахе и в Украине убедительно показали всем, что современная война требует самого широкого применения летающих, плавающих, ползающих беспилотных машин, причем двух разновидностей: разведывательных и ударных (атакующих).
Напомню в этой связи, что знаменитый польский писатель- фантаст Станислав Лем (1921–2006) еще в 1954 году (70 лет назад!) в своей книге «Магелланово облако» рассказал о планете, жители которой прятались в подземных сооружениях, и оттуда управляли по радио и телевидению боевыми машинами, воевавшими на поверхности. Несомненно, земляне идут именно по такому пути!
По сообщениям СМИ, флоты США и ряда других стран уже работают над тем, чтобы оснастить подводные лодки летающими разведывательными и ударными беспилотниками (БпЛА), запускаемыми с перископной глубины. Важными требованиями к таким аппаратам являются, во-первых, способность действовать в воздухе, на поверхности моря и под водой, а во-вторых — возвращаться на борт носителя.
Для иллюстрации своей мысли приведу пару примеров.
«Cormorant»
В конце 2003 г. DARPA заинтересовалось погружаемыми летательными аппаратами многоразового применения.
В мае 2005 г. оно заключило с подразделением «Skunk Works» компании «Lockheed Martin» 18-месячный контракт на проектирование и испытания техники, необходимой для создания «многоцелевого беспилотного летательного аппарата» (Multipurpose Unmanned Air Vehicle — MPUAV). Ему дали название «Cormorant» (Баклан).
«Skunk Works» дословно означает «Дела скунса», в вольном переводе — «всякие гадости». Задачей этого бюро является проверка и реализация «диких идей». Вдруг они на самом деле работают? Именно здесь был сконструирован высотный самолет-шпион U-2 (1957 г.), а потом самый быстрый в мире самолет SR-71 «Blackbird» (развивал скорость 3540 км/ч). Ещё позже самолёт-невидимка F-117, а также ряд других опытных и серийных машин*.
* U-2 поднимался на высоту 21 км. В 1960 г. его сбили ракетой в районе Свердловска лишь потому, что он снизился до 14 км.
В процессе проектирования конструкторы рассмотрели различные конфигурации, общими чертами которых были складные крылья и треугольный воздухозаборник реактивного двигателя. В итоге был избран фюзеляж треугольного сечения с двумя складывающимися крыльями по бокам. В полёте его геометрия напоминает чайку. Под водой крылья беспилотника сложены и не мешают движению.
Это решило проблему, как вместить машину в трубу диаметром чуть больше 2-х метров. Вель согласно заказу, дрон следовало запускать из ракетной шахты АПЛ типа «Ohio», находящейся в подводном положении**.
** В США за 20 лет (1976–1996) построили 18 АПЛ типа «Огайо». С 2002 г. они постепенно выводятся в резерв.
Первоначально эти шахты были предназначены для баллистических ракет «Trident I». Высота такой ракеты 10,4 м, диаметр 1,88 м. Высота ракетных шахт на ПЛ типа «Огайо» 13 м, диаметр 2,1 м.
Дрон многократного использования предназначен для визуальной и электронной разведки водной акватории и (или) прибрежной территории. Он также может сбрасывать на парашюте грузы для разведывательно-диверсионных групп, или атаковать бомбами вражеские объекты.
«Баклан» имеет два реактивных двигателя. Запас подводного хода у него невелик — только чтобы подняться на поверхность моря, а после выполнения задания погрузиться в воду в заданной точке.
Чтобы свести до минимума риск обнаружения себя во время запуска «Баклана», подводная лодка не выстреливает дрон из шахты как ракету, а выпускает его в воду и уплывает. Всплывая на поверхность, «Баклан» поворачивается в правильное положение, раскладывает обе половины крыла и взлетает с помощью двух бортовых ракетных ускорителей.
Затем сжатый газ поднимает его на поверхность, где включаются два твердотопливных ракетных ускорителя, и дрон взлетает. Поднявшись на высоту 30 метров, «Баклан» сбрасывает ускорители и включает маршевый турбовентиляторный двигатель, воздухозаборники которого под водой были закрыты заслонками. Построенный по технологии «stealth», дрон во время полёта является малозаметным объектом.
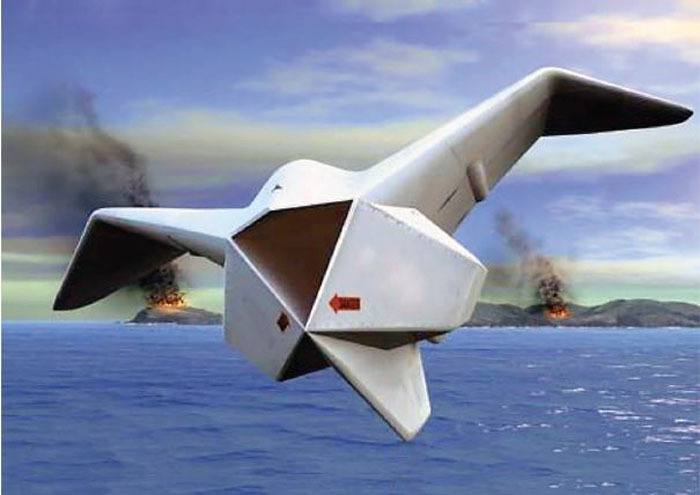
«Cormorant» (Баклан)
Посадка тоже интересная. Помимо спуска на парашюте, дрон способен совершить маневр: после полёта над самой водой подняться вертикально вверх, затем выключить двигатель, повернуться на 180 градусов и упасть в воду носом вперед.
Чтобы исключить повреждения при ударе о воду, все важные детали (особенно передние кромки крыла) заполнены застывшим материалом, представляющим собой сочетание металлической губки и полимерной пены. Внутренние отсеки аппарата заполнены инертным газом под давлением. Надувные уплотнения обеспечивают водонепроницаемость люков, крышек и других входных отверстий. Корпус и крылья аппарата изготовлены из титана, что делает дрон почти неуязвимым в боевых операциях.
ТТХ «БАКЛАНА»
Длина 5,79 м. Размах крыльев 4,86 м. Взлетный вес 4000 кг. Полезный груз 454 кг. Скорость максимальная 880 км/ч; крейсерская 550 км/ч. Дальность полета 800 км. Потолок 10680 м. Глубина погружения до 45 м. Бортовое оборудование: РЛС, радиостанция, электронно-оптические датчики, компьютер. Полезный груз: приборы для разведки, наведения на цель, электронного подавления, либо высокоточные боеприпасы для атаки важных целей.
Выполнив задание, «Баклан» возвращается в заданный квадрат моря. Там его компьютер отключает двигатели, герметично закрывает воздухозаборник и выхлопное сопло, выбрасывает парашют, на котором аппарат опускается в воду. Там он выпускает буксировочный трос с грузом на конце. АПЛ, не всплывая, отправляет навстречу дрону дистанционно управляемый аппарат, который захватывает трос и тянет дрон сначала в глубину, а потом в пусковую шахту*.
* Система возврата дрона на подводную лодку описана в патенте: U. S. patent 7.097.136
Здесь дрон заправляют и снаряжают для очередного старта. В интернете есть небольшой ролик об этом, представленный агентством DARPA.
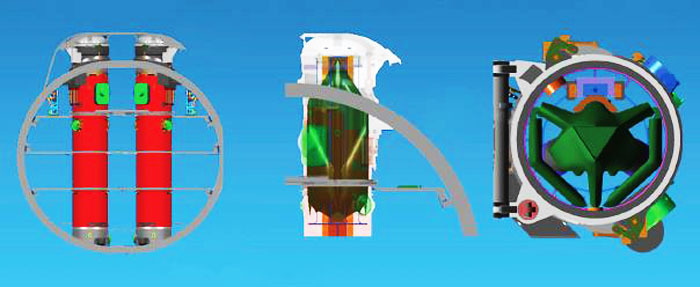
Слева направо: ракетные шахты в прочном корпусе АПЛ типа «Огайо», герметично закрытые тяжелыми крышками; дрон «Баклан» со сложенными крыльями в ракетной шахте — вид сбоку и вид сверху
Уже в конце октября 2006 г. на базе подводных лодок Китсап (Kitsap) под Вашингтоном были проведены испытания полномасштабного макета (сброс в воду, погружение на глубину, возврат на субмарину), которые продолжались несколько месяцев.

Запуск дрона с помощью ракетных ускорителей взлёта
Вертолет сбрасывал макет с высоты 8 метров. После приводнения он сам нырял в имитатор пусковой шахты! Были испытаны по отдельности все системы «Баклана», а также его уменьшенная модель и полномасштабная.
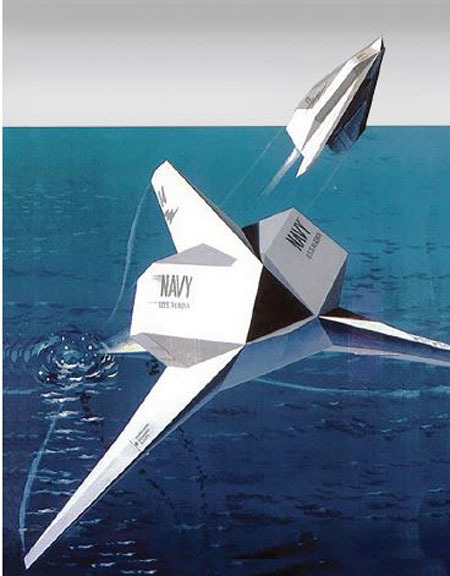
«Баклан» мог летать и в таком положении
На следующем этапе предстояло иcпытать взлет из воды при помощи ракетных ускорителей с мгновенным запуском двигателя, остановку двигателя с одновременным закрытием и герметизацией воздухозаборника и выпускного сопла. После этого следовало приступить к запускам дрона из ракетной шахты АПЛ.
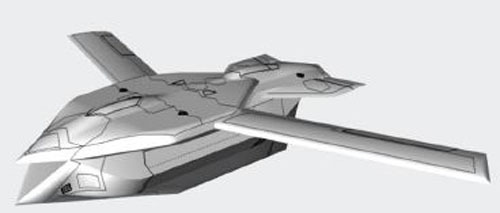
Макет «Баклана» для летных испытаний
Но в начале 2007 г. DARPA приостановило, а затем и отменило финансирование программы.
Дело в том, что в связи с «разрядкой» международной обстановки Пентагон и флот решили не тратить десятки миллионов долларов на «Cormorant», а поддержать проект крохотного 20 (кг) дрона «Scan Eagle» компании «Boeing».

Макет для подводных испытаний
Единственная его полезная нагрузка (около 3,5 кг) — электронно-оптические датчики, чаще всего видеокамера с возможностью работы в инфракрасном спектре.
В период «разрядки и разоружения» главным критерием для оценки новых систем военной техники стала стоимость, а не боевые возможности.
Модификация «Scan Eagle» для запуска в контейнере торпедного типа заняла всего несколько месяцев и стоила менее 100 тысяч долларов (тогда как доведение «Баклана» до рабочего проекта оценивалось в 10 миллионов долларов).

Концептуальная схема двухсредового дрона. Сверху вниз: дрон в полете; дрон на поверхности моря; дрон под водой. 1 — воздухозаборник (для дизель-мотора и поплавков); 2 — фюзеляж; 3 — складывающееся крыло; 4 — элерон; 5 — оперение; 6 — пропеллер; 7 — дизель-мотор; 8 — руль направления; 9 — гребной винт; 10 — электромотор; 11 — поплавки; 12 — выдвижной шток
Компания «Lockheed Martin» пыталась найти других инвесторов, но безуспешно. Проект был закрыт. Не исключено, что в настоящее время в связи с увеличением расходов на оборону во всех странах НАТО он все же получит продолжение.
Ведь аналоги этого аппарата, намного опередившего своe время, по-прежнему отсутствуют. Дрон компании «Boeing» В начале 2015 года Управление по патентам и товарным знакам США одобрило патентную заявку Натана Хиллера из компании «Boeing» на «воздушный и подводный аппарат быстрого развертывания». Другими словами, на летающий дрон, трансформирующийся в подводный.
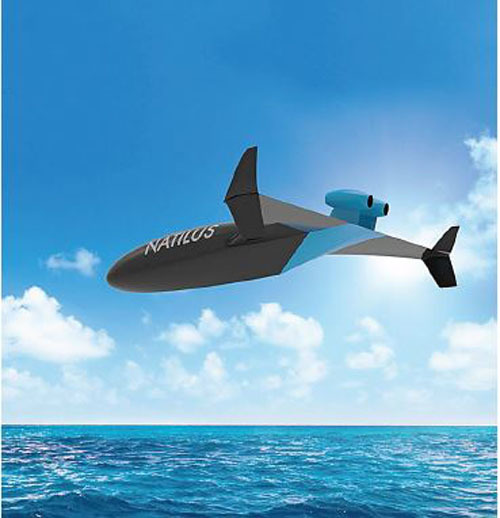
Дрон «Боинг» с реактивными двигателями
Вот как это работает. Самолет-носитель доставляет дистанционно управляемый дрон в район боевой операции. Там он отделяется от носителя, некоторое время летит самостоятельно, затем погружается в воду.
Чтобы уменьшить его вес и улучшить гидродинамические качества, он по команде сбрасывает крылья (и пропеллеры, если у него ДВС) с помощью взрывных болтов и водорастворимого клея. Вместо них появляются гребные винты, рули курса и глубины.
Н. Хиллер утверждал, что воздушную и водную тягу обеспечивает одна и та же двигательная установка, но не назвал её.
Заданную глубину погружения дрон соблюдает при помощи бортовых балластных цистерн и управляющих плоскостей (рулей глубины).
Находясь под водой, дрон ведет разведку либо осуществляет атаку избранной цели, применяя для этого свой полезный груз (электронику, взрывчатку или оружие). .
Когда задание выполнено, дрон всплывет на поверхность и передаст собранные данные в центр управления или другим дронам. Но пока данный патент остается нереализованным в металле.
Дрон «Outraider»
В 2017 г. англичане спроектировали и построили специально для подводных лодок беспилотник «Outrider» (Впередсмотрящий). Его длина 99 см, диаметр 7,63 см, вес 1,7 кг. Скорость полёта 91,2 км/ч. Две камеры (видео и инфракрасная) ведут наблюдение с неба в течение двух с половиной часов.
Дрон, изготовленный из углеродистого волокна, находится в транспортно-пусковом контейнере высотой 100 см и диаметром 76,3 см, выстреливаемом с подводной лодки сжатым воздухом. Когда контейнер попадает в воздух, он разваливается, а дрон расправляет крылья и пропеллер и летит.
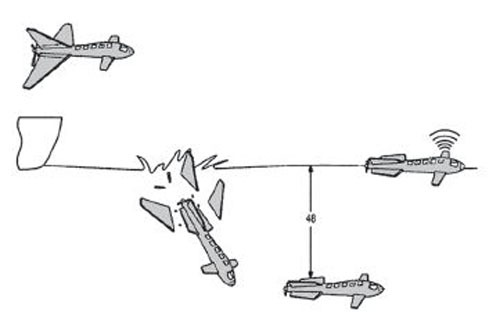
Схема полёта и трансформации дрона (рисунок из патента)
На электромоторе дрон летает бесшумно, и передаёт на экран оператора изображения высокой четкости.
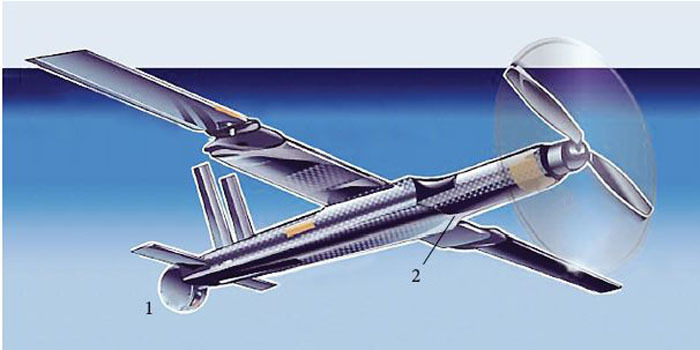
(1) Инфракрасная камера высокого разрешения. (2) Видеокамера высокогоразрешения с передачей «картинки» в режиме «online»
Дроном управляют с глубины через выдвижную штыревую антенну подводной лодки или же он действует автономно, по программе, заложенной в бортовой мини-компьютер. Оператор управляет дроном с помощью джойстика, встроенного в специальный телефон, или подключив контроллер к ноутбуку.
Дрон не может вернуться на подводную лодку, находящуюся в глубине, но если она всплывет, а дрон долетит до неё (или до «своего» корабля), то его можно использовать повторно.
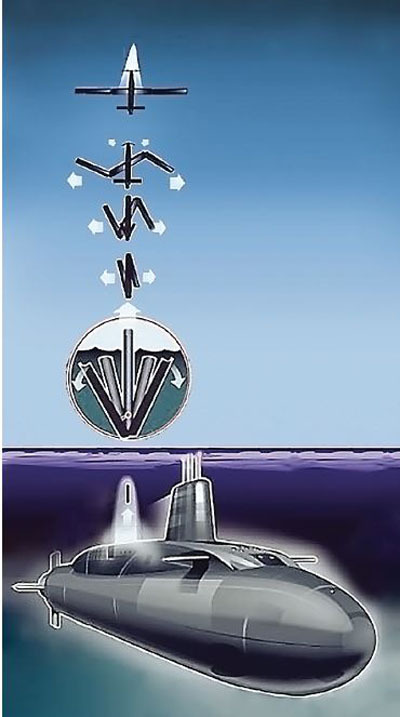
Запуск дрона с АПЛ
«Blackwing» (2021 г.)
Дрон «Blackwing 10C» компании «AeroVironment» (США), это небольшой летательный аппарат, который можно запускать с подводных лодок и других подводных аппаратов. Он разработан в рамках программы флота «Расширение боевых возможностей противодействия мобильным целям с применением БЛА подводных лодок» (Advanced Weapons Enhanced by submarine UAS against mobile targets).
«Blackwing 10C» представляет собой разведывательный вариант производимого «Aero Vironment» для армии США малого барражирующего боеприпаса «Switchblade 10С». Диаметр «Blackwing» 3 дюйма (диаметр трубы ПУ), длина 48,26 см (19 дм), размах крыльев 68,56 см (27 дм), вес всего лишь 1,82 кг (3 фнт).
Он предназначен для разведки вне зоны прямой видимости через перископ, для ретрансляции сигналов и команд с подводного объекта на другие суда и подводные объекты, а также на надводные и подводные дроны.
Дрон оснащен электрическим мотором с толкающим воздушным винтом. Продолжительность полета — до 60 минут; система связи — «Link 16»; система мониторинга — миниатюрная электронно-оптическая и инфракрасная; плюс к ней система GPS. Дрон передает электрооптические сигналы цифровой камеры, работающей в инфракрасном диапазоне, на выдвижную антенну подводной лодки. В 2021 г. флот США заказал 120 таких дронов.
Запуск дрона осуществляется с перископной глубины через систему запуска ложных целей (в контейнере акустического противодействия диаметром 76,2 мм), которая находится в ограждении выдвижных устройств АПЛ.
После старта и выхода из воды БЛА разворачивает крыло размахом 69 см. Аппарат оснащен видеокамерой и инфракрасной камерой и транслирует видеоизображение на лодку, находящуюся на перископной глубине, реализуя концепцию «летающего перископа». Аппарат имеет дальность действия в пределах радиогоризонта и защищенный цифровой канал передачи данных. Одновременно в воздухе могут находиться несколько «Blackwing 10C», управляемых с одной ПЛ. Они обеспечивают широкое освещение акватории, нацелены на один объект либо используются в качестве ретрансляторов друг для друга, тем самым увеличивая дальность обнаружения и передачи данных.
Летные испытания БЛА «Blackwing» шли с 2016 по 2020 г. Вице-адмирал Гоггинс сообщил, что в ходе испытаний его запуска- ли с многоцелевой АПЛ SSN-760 «Annapolis», находившейся на перископной глубине, «управляя ими далеко за линию горизонта». И добавил: «таким образом лодка смогла получить целеуказание и провести имитацию торпедной атаки надводного корабля, в данном случае целью был десантный корабль «Charleston» (LCS-18) типа «Independence» (3104 т; длина 127), на максимальной дальности действия торпеды». Наконец, В мае 2021 г. командование ВМС США сообщило о закупке у компании «AeroVironment» в течении двух лет 120 комплектов «Blackwing 10C», предназначенных для атомных подводных лодок.
В декабре 2023 г. командующий 7-й группой подводных лодок контр-адмирал Крис Кавано и контр-адмирал Морских сил самообороны Японии Ёсихиро Гока встретились на АПЛ SSB-763 «Santa Fe» (типа «Los Angeles»), где американский адмирал демонстрировал SLUAS японскому коллеге. «Blackwing» способен действовать «за пределами прямой видимости», т.е. дальше, чем горизонт, видимый с подводной лодки, а это как минимум 13 миль (24 км).
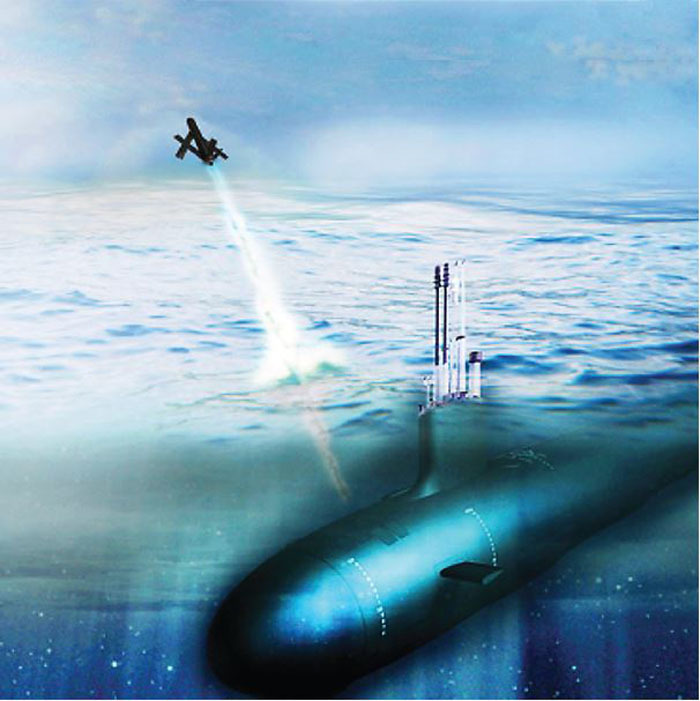
Запуск «Blackwing» с АПЛ осуществляется при помощи всплывающего контейнера диаметром 76 мм
Китайские дроны
Исследовательская лаборатория Нанкинского университета аэронавтики и астронавтики построила летающий-ныряющий дрон. У него 4 пропеллера, включая пару наклоняющихся спереди. Он скользит под водой, сложив на спине крылья для улучшения обтекаемости. При всплытии на поверхность крылья разворачиваются, и дрон летит со скоростью 120 км/ч — в два раза быстрее, чем обычный дрон, приводимый в движение несущим винтом.
Разработчики утверждают, что этот дрон может медленно подкрадываться к подводной цели и подолгу стоять на одном месте. Он «потребляет мало энергии при полете с неподвижным крылом, поэтому может выполнять дальние полеты в воздухе», — сказал профессор Ан Хайсун. Группа профессора Ана построила два уменьшенных прототипа с размахом крыльев 198 см. Более крупные реальные дроны будут иметь широкий спектр военного использования. Например, их преимуществом является возможность уклоняться от воздушного и морского перехвата и совершать внезапные атаки типа «камикадзе».
Дрон команды профессора Ана имеет ёмкость в днище, наполняемую водой, чтобы регулировать плавучесть и бесшумно опускаться на заданную глубину, не используя гребной винт.
Самая большая проблема — взлёт. Если аппарат взлетает прямо из воды, взлёту мешают волны, а также ветер и брызги. Чтобы исправить это, они разработали сложный механизм управления, благодаря которому дрон сначала разгоняется по волнам, прежде чем подняться в воздух. Вполне возможно, что им управляет ИИ. В таком случае он способен отслеживать и уничтожать цели без вмешательства человека. Кроме того, он может применяться как дрон-камикадзе.
Профессор Цзи Ваньфэн из Университета военно-морской авиации в Яньтае заявил, что такие дроны являются дешевым и эффективным средством прорыва обороны ударного авианосного соединения США.
По его оценке, многоуровневая система защиты современного военного корабля может сбить от 50 до 90 % приближающихся к нему самолетов, ракет или традиционных воздушных дронов. Но ныряющий дрон уйдет под воду, если его обнаружит радар, и всплывет на поверхность, чтобы уклониться от гидролокатора.
Поэтому несколько таких дронов собьют с толку защиту военного корабля.
Двухсредовый аппарат, запущенный с расстояния до 100 км, имеет почти 100 % шансы на достижение цели, если он летит со скоростью не менее 145 км/ч, сказано в статье Цзи Ваньфэна, опубликованной в китайском журнале «Electronics Optics & Control».
• • •
Однако сейчас требования к дронам подводного базирования усложнились. Как я уже отметил выше, на повестке дня стоит задача сделать их способными действовать в воздухе, на поверхности воды и под водой. Кроме того, желательно, чтобы они были многоразового применения.
Судя по всему, магистральным путем надолго станет создание беспилотных аппаратов, запускаемых с подводных лодок и возвращающихся к ним после выполнения полётного задания. В настоящее время все они пригодны только для наблюдения и разведки. Несомненно, достаточно скоро появятся и ударные дроны с подводным стартом — сначала одноразовые, а потом и многократного применения.
Например, армия США с весны 2007 г. получает серийный дрон «Reaper» (Жнец смерти). Дальность его полета 5900 км, потолок — до 15 км. При взлетном весе 4760 кг он несет 4 ракеты класса «воздух — земля» и 2 управляемые бомбы общей массой около 1700 кг. Его крейсерская скорость 250 км/час, максимальная — 400 км/час.
Но размеры... Размах складывающегося крыла — 25 м, длина — 11 м. Понятно без лишних слов, что для подводной лодки, даже атомной, такие габариты неприемлемы. Но и дальность 5900 км ей тоже ни к чему. Следовательно, если сократить дальность, скажем, до 2000 км, а сам полёт осуществлять на высоте не более 250 метров (с огибанием складок местности), сократить массу боевой нагрузки, то размеры дрона можно значительно уменьшить, сохранив нынешнюю боевую нагрузку.
Пока что дальше всех в этом направлении продвинулись китайские конструкторы.
ЗАКЛЮЧЕНИЕ
Итак, ни один проект погружающихся самолетов, способных попеременно совершать полёт в воздухе и подводное плавание, не был реализован на практике.
Причина в том, что конструкторы таких самолетов сталкиваются с целым рядом объективных трудностей. Объединение двух принципиально разных функций усложняет конструкцию планера, двигателя, источников энергии, приборов управления, наблюдения и связи, вооружения.
Кроме того, подводное плавание и полёт в воздухе — принципиально разные процессы. Поэтому ныряющий самолет должен иметь два отдельных двигателя или комбинированную систему. Такое же требование актуально для средств навигации и связи, попеременно работающих в разных условиях.
В США были разработаны несколько эскизных проектов летательных аппаратов такого рода, но дальше дело не пошло. Ни одна научно-исследовательская работа не завершилась полноценным рабочим проектом.
Основные причины следующие.
Во-первых, не просматриваются преимущества двухсредовых пилотируемых самолетов перед воздушными и подводными аппаратами традиционных конструкций.
Во-вторых, неясно их место в существующих организационных структурах авиации и флота. Скорее всего, место им в Силах специальных операций.
В-третьих, соотношение затрат и возможных выгод. Разработка, строительство и испытания ныряющих самолетов дело достаточно дорогое и долгое. В итоге накопленный научный, конструкторский и практический опыт остается невостребованным.
ПРИЛОЖЕНИЕ НЕ ЛПЛ, НО ЧТО-ТО ПОХОЖЕЕ
В 1944–45 гг. немецкие инженеры работали над созданием принципиально новых образцов оружия и военной техники, которые пропаганда нацистов называла «чудо-оружием» (Wunderwaffe) и «оружием возмездия» (Vergeltungswaffe), кратко — V (Фау). Руководители Третьего Рейха надеялись, что это оружие переломит ход войны в их пользу.
Официальный список такого оружия никогда не существовал, но в разное время его составляли журналисты и литераторы. Вот один из таких списков.
V1 — крылатая ракета (самолет-cнаряд) Fi-103;
V2 — баллистическая ракета А-4 (конструктор В. фон Браун);
V3 — сверхдальнобойная пушка («многоножка») для обстрела Лондона;
V4 — самолет-большая бомба (пилотируемый Юнкерс-88, начиненный взрывчаткой);
V5 — система морского запуска ракеты V2 для обстрела городов США;
V6 — зенитная управляемая ракета «Wasserfall» (конструктор В. фон Браун);
V7 — дисколеты (конструкторы Шривер, Шуман, Шауберг и другие);
V8 — сверхдальний бомбардировщик («Amerika-bomber» компании «Junkers»)
V9 — двухступенчатая межконтинентальная ракета А9/А10 (конструктор В. фон Браун);
V10 — подземная диверсионная лодка (конструкторы Х. фон Верн; Риттер);
V11 — атомная бомба (главный конструктор проекта Отто Ган);
V12 — летающая подводная лодка (конструкция бюро Г. Вальтера).
В рамках данной книги интересен последний из перечисленных проектов. Сразу возникает вопрос: откуда «пошел слух» об этом гибриде?
А вот откуда:
Из краткого сообщения корреспондента австралийской газеты «Evening Standard», опубликованного 22 июня 1945 года. Читаем:
Открыты планы германской «летающей подводной лодки» (от нашего спецкорреспондента) Лондон, 21 июня 1945 г. Королевский флот обнаружил на заводе в балтийском порту Травемюнде (Travemünde), где немцы строили свои сверхмалые подводные лодки, чертеж Vl2 — летающей подводной лодки — рассказывает наш корреспондент. Vl2 спроектирована так, что имеет крылья, приваренные к корпусу, и обладает возможностью нырять под воду и взлетать в воздух. В примечаниях, прилагаемых к чертежам, говорится, что разработка Vl2 требует времени, но это оружие будет готово к использованию в следующей мировой войне, возможно, через 15 лет. (Перевод мой — А.Т)
Если необходимость — мать изобретений, то отчаяние — мать безумных идей. По мере того, как приближалась высадка англо-американских войск в Европе, командование Кригсмарине всё больше и больше увлекалось так называемыми штурмовыми средствами.
Среди них известны человекоуправляемые торпеды, сверхмалые подводные лодки (в сумме построили более тысячи)*, радиоуправляемые моторные лодки-брандеры, сверхмалые торпедные катера и торпедные катера на подводных крыльях (в том числе погружаемые).
* СмПЛ типа «Бобр» (Biber) — 324; типа «Щука» (Hecht) — 50; типа «Саламандра» (Molch) — 363; типа «Тюлень(Seehund) — 285. Всего: 1022.
Идея была проста: построить всё это в громадном количестве, чтобы потопить флот вторжения союзников. Штурмовые средств и оружие возмездия не спасли Третий Рейх от разгрома. Но некоторые проекты были интересные.
Изучив материалы зарубежных интернет-форумов, на которых обсуждают «секретные» проекты оружия и военной техники за последние 100 лет, я пришел к выводу, что обозначение «Фау- 12» по принципу «испорченного телефона» приклеили гибриду сверхмалой подводной лодки и катера на подводных крыльях, известному под шифром «Manta»*.
* Манта, или «морской дьявол» — самый большой скат. Вес до 3-х тонн, ширина — до 9 м, длина — до 6 м.
Называть его «летающим» некорректно. По-немецки проект назывался Untersee-gleitflächen-Schnellboot (UGS), что переводится как «подводная (и) глиссирующая скоростная лодка». Проект совместно разработали инженеры КБ Гельмута Вальтера в Киле и Испытательной команды-456 (Versuchskommando-456).
Если бы такие гибриды построили в большом количестве до июня 1944 г., они могли бы потопить или вывести из строя много кораблей союзников, собранных для высадки войск в Нормандии в день «Д». В принципе, в них могли попасть своими снарядами только 40-мм и 20-мм зенитные автоматические пушки, но при условии, что посты управления зенитным огнем быстро перестроятся на ведение огня по скоростным надводным целям.
• • •
Г. Вальтер сконструировал силовую установку нового типа. Она использовала реакцию разложения перекиси водорода для образования пара высокого давления. Пар, в свою очередь, приводил в движение турбину, которая вращала гребной винт. Этот процесс не требовал подачи воздуха, поэтому двигатель мог работать и тогда, когда подводная лодка находилась на глубине. Вальтер запатентовал основную идею еще в 1925 г., но потребовались годы, чтобы его идея получила признание. Только в январе 1940 г. была завершена постройкой экспериментальная подводная лодка V-80. Её размеры сопоставимы с «Мантой»: длина 22 м, ширина 2 м, высота от киля до крыши рубки 3,2 м. Благодаря одной турбине Вальтера мощностью 2000 л.с. она показала на испытаниях невероятную скорость — 28,5 узлов (52,7 км/ч) на поверхности воды и 28,1 узла (52 км/ч) под водой. Обычные подводные лодки ходили тогда не быстрее 18/10 узлов (33,3/18,5 км/ч).
Война замедлила проектно-конструкторские работы, но всё же в 1942–44 г. верфь «Германия» в Киле построила 4 боеспособные подводные лодки типа XVIIА (по 277/309 т) и 3 типа XVIIB (по 236/259 т). Они ходили под водой со скоростью до 25 узлов!
Конструкция
Проект «Манта» должен был резко увеличить скорость и дальность плавания СмПЛ. Решение задачи привело к созданию малого корабля радикально новой конструкции.
Этот гибрид корабля и самолета использовал хорошо известный авиаконструкторам «эффект крыла, летящего возле земли». При движении полным ходом (на поверхности воды) в пространстве «Манты» под основным крылом, ограниченном вертикальными килями, возникал бы уплотнённый поток воздуха, который почти полностью поднимал бы её над водой!
СмПЛ состоит из трех цилиндрических корпусов, соединенных основным крылом и двумя вертикальными килями. В центральной трубе находится кабина для двух членов экипажа (с куполообразными фонарями для обоих), дизель-электрическая силовая установка и гидравлическая трансмиссия, соединяющая дизели с гребными винтами в нижней части килей.
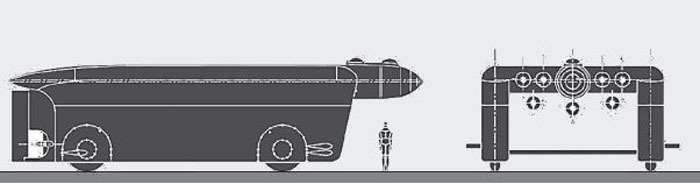
«Манта»: вид сбоку и спереди
Навигационное оборудование такое же как на «Косатке» (ручка управления авиационного типа, гирокомпас, лаг, глубиномер, визир, радиостанция и др.).
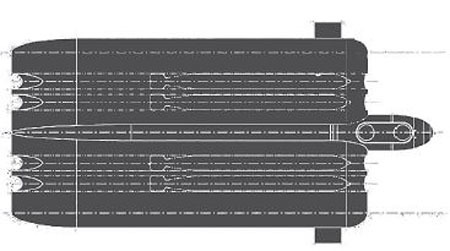
«Манта»: вид сверху
Средства обеспечения безопасности: маркерный буй с антенной, самонадувающаяся резиновая лодка, специальные легководолазные костюмы. Кроме того, экипаж мог сбросить из килей две тяжелые электрические батареи, что обеспечило бы дополнительную плавучесть и помогло достичь поверхности в случае чрезвычайной ситуации.
Два наружных цилиндра своей формой повторяли корпус скоростной СмПЛ «Косатка-I» (Schwertwal). В них находились топливные баки с инголином, триммерные и компенсационные цистерны, а также аккумуляторы.
Переднее и заднее подводные крылья были установлены так низко, что при достижении определенной скорости могли поднимать всю конструкцию из воды. а в каждом киле — своя турбина. Крыло разделено на верхнюю и нижнюю части, между которыми как в бутерброде расположены 4 трубы для пуска торпед (4 корабельных калибра 533 мм, или 8 авиационных калибра 450 мм), либо для 8 мин авиационного сброса ТМА или 12 мин типа ТМB (цилиндрические, диаметром 45 см). Они также могли нести 4 «снаряда», точное описание которых отсутствует, скорее всего, это были тяжелые ракеты.
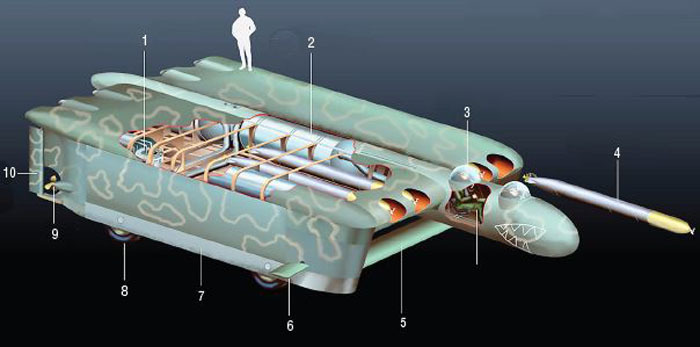
Схема устройства «Манты» 1) турбины Г. Вальтера; 2) резервуары с перекисью водорода; 3) кабина с двумя плексигласовыми колпаками; 4) 533-мм торпеда G7; 5) подводное крыло; 6) правый руль для управления тангажем; 7) аккумуляторы в боковых корпусах; 8) колесо; 9) гребной винт; 10) правый курсовой руль
Длина «Maнты» 14.95 м, ширина 6 м, диаметр каждого из трех цилиндрических корпусов — 1,5 м. Вес пустой 15 тонн, полностью заправленной и вооруженной — около 50 тонн.
ЭУ: два дизель-генератора по 600 л.с. и две турбины Вальтера по 800 л.с., плюс два электромотора по 440 кВт. Максимальная надводная скорость (по проекту) 50 узлов (92,6 км/ч), максимальная скорость под водой — 30 узлов (55 км/ч). Дальность на поверхности: 200 миль на 50 узлах, или 600 миль на 20 узлах. Дальность под водой 120 миль на 30 узлах или 500 миль на 10 узлах.
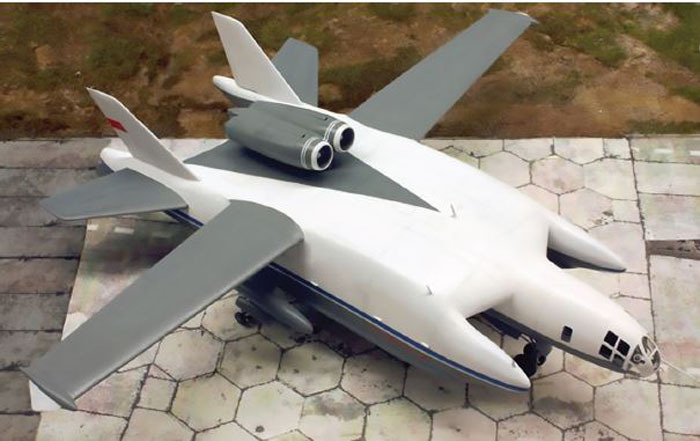
Макет экраноплана Бартини ВВП-14М1П Длина 25,97 м. Высота 6,79 м. Размах крыла 30 м. Взлетная масса 52 т (в том числе 2 т бомб). Масса пустого 35,35 т. Два турбовентиляторных двигателя тягой 6800 кг/сек каждый. Дальность 2400 км. Скорость до 760 км/ч. Высота полета – 3 м. Экипаж 3 чел.
При движении «Манты» (с полной загрузкой) посредством турбин проектная удельная мощность на тонну водоизмещения составляла бы 31,25 л.с. Во время атаки в надводном положении она должна была развивать скорость 40–50 узлов (74–93 км/ч) и представляла бы собой трудную цель. Все же я думаю, что в действительности (если бы этот гибрид построили и вывели на испытания) его надводная скорость была бы на 6–8 узлов меньше проектной, а подводная — меньше на 8–10 узлов.

Возле «Манты» для сравнения показана разведывательная бронемашина «Пума» Sd. 234/1 (длина 5,86 м, высота 2,1 м, вооружение: 20-мм пушка и 7,92-мм пулемет; экипаж 4 человека)
Глубина погружения 50 метров тоже невероятна для столь легкого аппарата. Больше похожа на правду цифра 10 метров.
Хотя гибрид имел 4 больших колеса авиационного типа, ездить по земле он не мог. При движении по воде полным ходом на скорости свыше 80 км/ч два боковых киля должны были не рассекать волны, а катиться по волнам на этих колесах. Реально ли это? Никто не знае
Оценка
ПроектUGS (Untersee-gleitflächen-Schnellboot) намногоопередилсвоёвремя. Если искать с чем сравнить, то кроме экспериментального советского универсального экраноплана Роберта Бартини ВВА-14М1П (1974 г.) ничего другого на ум не приходит.
Но он существовал только в чертежах и в виде небольшого макета. Почти все документы по проекту были сожжены в дни капитуляции Германии. Остался только макет, по которому после войны рисовали чертежи в трех проекциях.
Имеет ли этот проект какое-то значение сегодня?

Макет «Манты». Вверху видны 4 гребных винта турбин Вальтера. Внизу — 2 гребных винта электромоторов
Гибриды типа «Манта» предназначались для атаки противника торпедами с близкой дистанции, а корабельные радиолокаторы и гидролокаторы в 1944 г. уже могли обнаружить их на подходе к рубежам выхода в атаку.

Макет «Манты»
В настоящее время концепция такого гибрида приемлема только для ракетных катеров. Ведь они могут запускать управляемые ракеты с дальних дистанций — 25, 50 и даже 100 км. Одновременная атака 4, 6 или 8 ракет, летящих на сверхзвуковой скорости, не оставит кораблю-цели никаких шансов на выживание.