

Неизвестный танк часть 5 - 12
- Опубликовано: 23.04.2016, 13:59
- Просмотров: 124805
Содержание материала
ПРИВОДЫ УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПОВОРОТА
ТРЕБОВАНИЯ К ПРИВОДАМ УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПОВОРОТА
Приводы управления механизмами поворота должны позволять механику-водителю поворачивать танк с любым радиусом — от наибольшего, когда танк движется прямолинейно, до наименьшего расчетного; при этом переход от одного радиуса к другому должен совершаться плавно.
Изменение радиуса поворота достигается сначала переключением передачи коробки (ступени механизма) отстающей гусеницы с высшей на низшую или с низшей на нейтраль, а затем регулированием пробуксовки тормоза или фрикциона.
Так, для получения различных радиусов поворота танка с двухступенчатым планетарным механизмом надо сначала выключить на отстающей стороне высшую (вторую) ступень и постепенно затягивать тормоз первой ступени до отказа, а потом выключить первую ступень и, перейдя на нейтраль, т. е. отъединив ведущее колесо отстающей гусеницы от двигателя, снова постепенно затягивать остановочный тормоз до отказа. Это правило действительно для любого независимого механизма. На танках с дифференциалом тормоз затягивается без отключения полуоси.
Таким образом, управление механизмами поворота сводится к чередованию включения и выключения фрикционных устройств в строгой последовательности. Управление правой и левой гусеницами осуществляется обычно отдельными рычагами, причем изменение положения рычага от крайнего переднего до крайнего заднего изменяет радиус поворота от наибольшего до наименьшего.
Значительно реже применяется для управления рулевое колесо (штурвал). Поворот штурвала вправо соответствует передвижению правого рычага, а поворот влево — левого.
Для торможения танка желательно иметь ножной привод, который воздействовал бы на оба остановочных тормоза, не влияя на механизмы поворота. Это особенно важно при спуске танка с горы.
Механизм управления должен быть устроен так, чтобы механик-водитель прилагал силу только на ту операцию, которая необходима в данный момент. Поясним это примером. Для поворота танка с бортовыми фрикционами нужно выключить один фрикцион, а затем затянуть тормоз. Допустим, что для выключения фрикциона требуется сила на рычаге, равная 20 кг, а для затяжки тормоза — 30 кг. При правильно устроенном механизме силу 20 кг механик-водитель прикладывает только до тех пор, пока фрикцион не выключится; в это время не требуется сила для затяжки тормоза. Когда фрикцион будет выключен, удерживать его пружины в сжатом положении механику-водителю не потребуется, так что на время затяжки тормоза ему придется приложить на рычаге силу только 30 кг.
ПРИВОД К ТОРМОЗУ
Простейший привод управления — привод к тормозу показан на рис, 512.

Рис. 512 Простейший привод к тормозу
Если передвигать рычаг, то вместе с ним будет передвигаться тяга, вызывающая затягивание тормоза; чем больше ход рычага, тем сильнее затягивается тормоз и тем меньше радиус поворота танка. При крайнем заднем положении рычага тормоз затянут до отказа, тормозной барабан не вращается, и танк поворачивается с расчетным радиусом. Такое устройство позволяет выполнять только одну операцию — затягивать тормоз; следовательно, оно пригодно лишь для управления дифференциалами — простым или двойным.
ПРИВОД УПРАВЛЕНИЯ БОРТОВЫМ ФРИКЦИОНОМ И ТОРМОЗОМ
На рис. 513 показан привод управления бортовым фрикционом и тормозом.
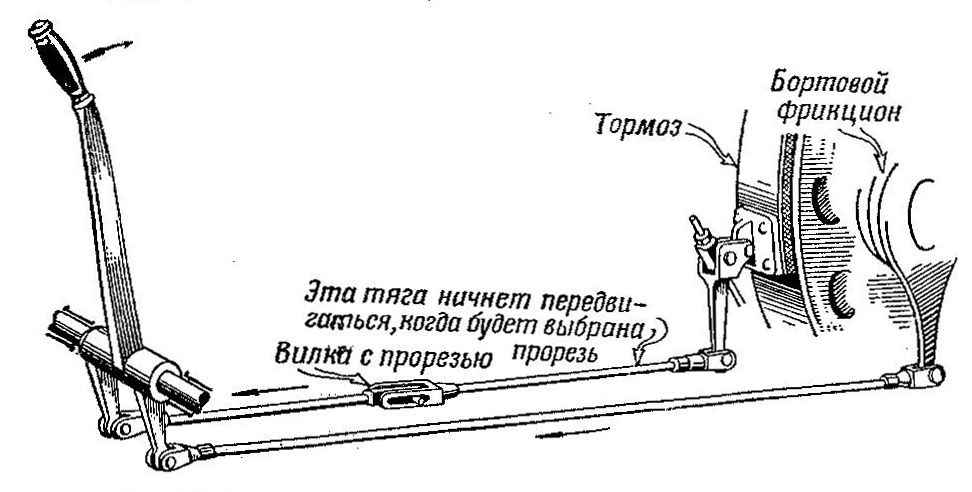
Рис. 513 Привод управления бортовым фрикционом и тормозом
Сравнительно с рассмотренным ранее этот привод сложнее. Он состоит из двух тяг, одна из которых разрезная. Половины разрезной тяги соединены вилкой с прорезью, в которую входит палец. В начале хода рычага управления тормоз не затягивается. Передняя половина тормозной тяги движется, а палец свободно скользит в прорези вилки задней половины тяги до тех пор, пока не упрется в конец вилки. Лишь после этого тормоз начинает затягиваться.
Таким образом, в начале хода рычага происходит выключение фрикциона, после чего начинается затяжка тормоза. Тяга фрикциона в таком приводе движется все время, пока перемещается рычаг управления, даже после того, как фрикцион выключится; поэтому во время торможения работа механика-водителя бесполезно затрачивается на дополнительное сжатие пружин фрикциона. Такой привод хотя и обеспечивает надлежащую последовательность операций управления, но не разделяет сил. Его применяли только на легких танках, для управления которыми не требовалось значительной силы.
РАЗДЕЛИТЕЛЬ
Чтобы уменьшить силу, необходимую для управления механизмами поворота, в привод вводят разделитель (рис. 514).
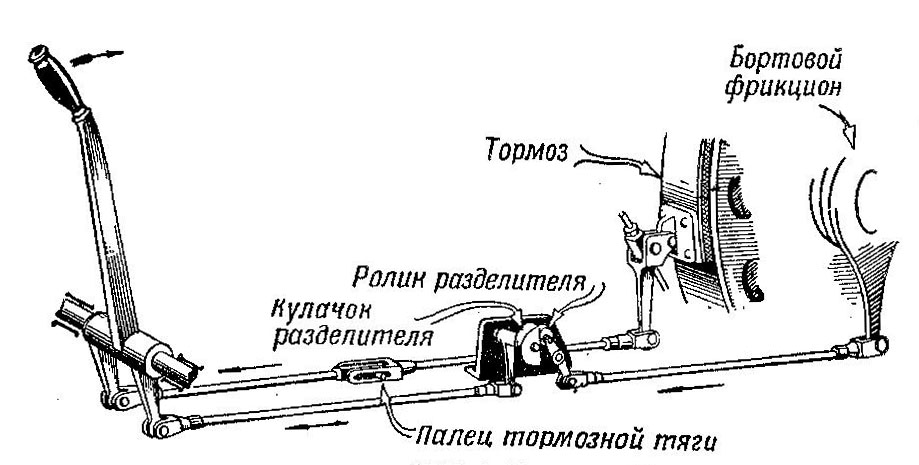
Рис. 514 Привод с разделителем
Для этого конец передней тяги, идущей от рычага управления, соединяют с валиком, на котором сидит кулачок разделителя. Кулачок разделителя (рис. 514, 515, А) представляет собой шайбу, имеющую рабочую и нерабочую поверхности (профили).
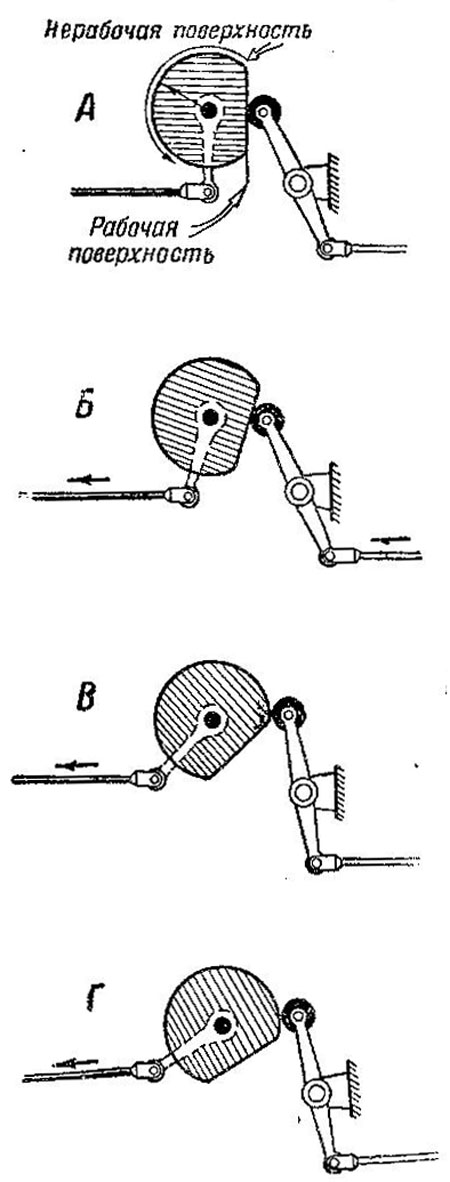
Рис. 515 Работа разделителя
Форма рабочего профиля, такая, что, когда кулачок поворачивается, ролик, прижатый к нему, отходит назад. При этом тяга, идущая к фрикциону, перемещается, выключая фрикцион (рис. 515, Б). Второй профиль — нерабочий — представляет собой дугу окружности, центр которой находится на оси кулачка. Катясь по этойокружности, ролик не перемещается. Следовательно, не происходит и дальнейшего сжатия пружин фрикциона (рис, 515,В и Г), Пока происходит выключение фрикциона, тормоз еще не затягивается, так кай палец рычажка тормоза скользит в.прорези вилки тяги (см, рис. 514). Когда фрикцион выключится полностью, палец тормозной тяги пройдет всю прорезь, упрется в переднюю стенку вилки, и тормоз начнет затягиваться.
Во время выключения фрикциона, пока ролик катится по рабочему профилю ку лачка, сжатые пружины фрикциона, стремясь разжаться, действуют через детали меха-низма выключения и привода и прижимают ролик к кулачку (рис. 516, вверху).

Рис. 516 Силы, действующие на кулачок разделителя
Таким образом, со стороны ролика на кулачок действует сила, стремящаяся сдвинуть кулачок. Линия действия этой силы не проходит через ось кулачка, поэтому она вместе с вызываемой ею силой сопротивления, приложенной к оси кулачка, создает пару сил. Эта пара сил препятствует повороту кулачка все то время, пока ролик катится по рабочему профилю. Чтобы повернуть кулачок, механик-водитель должен приложить силу к рычагу управления. Когда ролик перейдет на нерабочий профиль (рис. 516, внизу), линия действия силы от сжатых пружин проходит через ось кулачка, и плечо пары сил равно нулю. Следовательно, механику-водителю после выключения фрикциона приходится прилагать силу к рычагу лишь для затяжки тормоза, в дополнение к этому требуется небольшая сила для преодоления трения ролика, катящегося по кулачку,