

Неизвестный танк часть 5 - 10
- Опубликовано: 23.04.2016, 13:59
- Просмотров: 122388
Содержание материала
ДИФФЕРЕНЦИАЛЬНЫЕ МЕХАНИЗМЫ
ПРОСТОЙ ДИФФЕРЕНЦИАЛ
Схема трансмиссии с простым дифференциалом показана на рис. 503.
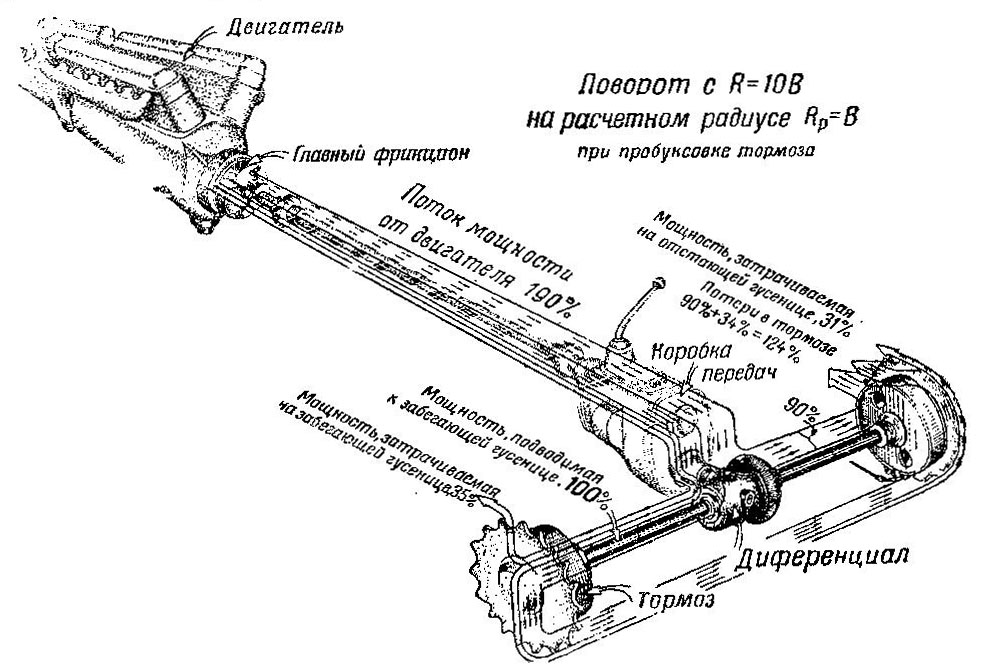
Рис. 503 Схема трансмиссии с простым дифференциалом
В зависимости от устройства различают дифференциалы конические и цилиндрические.
На рис. 504 показана схема конического дифференциала, а на рис. 505 — его устройство.

Рис. 504 Схема простого конического дифференциала

Рис. 505 Устройство простого конического дифференциала
Дифференциал представляет собой планетарный механизм. Его водило, называемое обычно коробкой сателлитов, связано через коническую передачу с ведомым валом коробки передач. Каждый сателлит сцеплен с двумя шестернями полуосей (солнечными шестернями). Одна из них соединена полуосью с правым, другая с левым ведущим колесомтанка. На полуосях поставлены тормоза (см. рис. 503).
Чтобы понять, как работает дифференциал, представим себе, что сателлиты в нем заменены рычажками (рис. 506, А и Б).
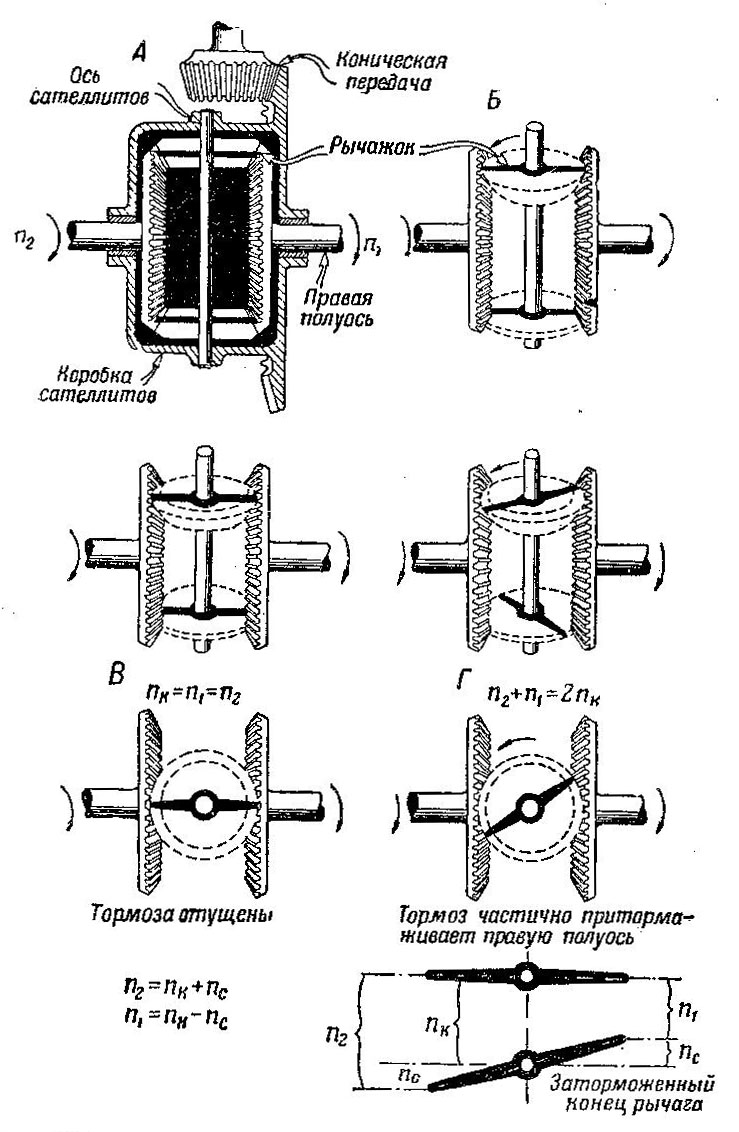
Рис. 506 Схема работы простого конического дифференциала
Рычажок средней частью установлен на оси, закрепленной в коробке сателлитов, а концы его находятся между зубьями полуосевых шестерен.
Пусть сопротивление движению обеих гусениц одинаково и тормоза на полуосях отпущены (рис. 506, В). Тогда, чтобы повернуть каждую из шестерен полуосей, требуется одинаковая сила. Если начать вращать коробку сателлитов, рычажок, середина которого-перемещается вместе с коробкой, увлечет обе шестерни полуосей.
Если танк движется по ровной дороге и на обеих гусеницах сопротивления одинаковы, коробка сателлитов, полуосевые шестерки и сателлиты вращаются как одно целое.
Если обозначить число оборотов коробки сателлитов через nk а число оборотов полуосей n2 и n1 то в этом случае
n2 = n1= nk
Затянем частично тормоз одной полуоси так, чтобы он мог пробуксовать (рис. 506, Г). Тогда ведущее колесо этой полуоси начнет отставать. Вместе с ним будет отставать шестерня полуоси и связанный с нею конец рычажка. Рычажок начнет поворачиваться на своей оси. Ввиду того что середина рычажка перемещается вместе с коробкой сателлитов, заторможенный конец его будет отставать от середины, а свободный обгонять ее.
Пусть середина рычажка переместилась на расстояние пк (рис. 506, схема внизу). Заторможенный конец рычажка отстанет от середины на величину пс и пройдет расстояние п1 = пк — пс. Рассматривая рисунок, нетрудно убедиться, что второй конец рычажка всегда будет обгонять середину на столько, на сколько отстает первый, т. е, на величину пс; значит, второй конец пройдет путь п2 = пк + пс. Отсюда следует, что связанная со свободным концом рычажка шестерня полуоси будет подгоняться им и вращаться быстрее коробки: п2 > пк , а вторая (заторможенная) будет задерживаться и вращаться медленнее коробки: п1 < пк.
От рычажка нетрудно перейти к сателлиту. В данном случае сателлит будет вращаться на своей оси, задерживая одну шестерню и подгоняя другую. Если коробка сателлитов сделает nк об/мин, то одна полуось (забегающая) будет делать n2 = nк + ncоб/мин, а другая (отстающая) n1 = nк — nсоб/мин, т. е. на сколько увеличится число оборотов забегающей полуоси, на столько уменьшится число оборотов отстающей.
Сложим числа оборотов забегающей и отстающей гусениц:
n2+ n1 = nк + nс + nк - nс
или
n2 + n1 = 2 nк
Отсюда видно, что, как бы ни изменялось число оборотов полуосей, сумма их всегда останется одной и той же, если обороты двигателя постоянны; она равна удвоенному числу оборотов коробки сателлитов.
Когда одна из полуосей, допустим первая, заторможена полностью, она не вращается, т. е. ее обороты n1 = 0; тогда n2 + 0 = 2nк или n2 = 2nк, Следовательно, при полном торможении одной полуоси вторая полуось вращается вдвое быстрее коробки сателлитов.
Рассмотрим управление танка с дифференциалом.
Если сопротивление движению обеих гусениц одинаково и тормоза не затянуты, сателлиты не будут вращаться на своих осях и, следовательно, обе шестерни полуосей будут делать одинаковое число оборотов, равное числу оборотов коробки сателлитов. Танк будет двигаться прямолинейно.
Чтобы повернуть танк, надо затянуть тормоз с той стороны, в которую нужно повернуться. Сателлиты начнут вращаться на своих осях, причем шестерня полуоси, связанная с отстающей гусеницей, будет вращаться медленнее, чем в случае прямолинейного движения танка, а связанная с забегающей быстрее. Скорости гусениц станут неодинаковыми, и танк начнет поворачиваться.
Здесь выясняется одно отрицательное свойство дифференциала. При повороте необходимо, чтобы скорость отстающей гусеницы уменьшилась. Но увеличение скорости забегающей гусеницы не является необходимостью; наоборот, оно нежелательно. Мощность, нужная для поворота, значительно превышает мощность прямолинейного движения. Из-за этого перед поворотом часто приходится переходить на низшую передачу, чтобы двигатель не заглох. Дифференциал же повышает скорость забегающей гусеницы, что еще более увеличивает нагрузку на двигатель.
Чем сильнее затянут тормоз, т. е. чем круче поворот, тем больше увеличивается скорость забегающей гусеницы, в то время как на крутых поворотах нагрузка на двигатель и без того весьма велика.
При полностью затянутом тормозе отстающая гусеница остановится, я забегающая станет вращаться вдвое быстрее, чем при прямолинейном движении (конечно, если число оборотов двигателя и передача коробки останутся прежними). В данном случае танк будет поворачиваться с расчетным радиусом Rр = В; при этом вся мощность двигателя расходуется на внешние сопротивления, так как в тормозе мощность не расходуется (тормозной барабан не вращается). Поворот на всех остальных радиусах сопровождается пробуксовкой тормоза.
На рис. 503 показано распределение мощности при повороте танка с простым дифференциалом. Для сравнения с другими механизмами, рассмотренными нами выше, взят тот же радиус поворота (R= 10 В) и та же скорость забегающей гусеницы. Мощность, подводимая к забегающей гусенице, как и ранее, принята за 100%. Вся эта мощность подводится от двигателя; циркуляции мощности нет, так как на пути возвращаемой мощности, на полуоси, стоит тормоз, и вся идущая от отстающей гусеницы мощность будет затрачена на трение в этом тормозе.
Как мы уже говорили, мощность внешних сопротивлений не зависит от того, какой механизм поворота установлен на танке. Поэтому из 100% мощности, подведенной к забегающей гусенице, как и в предыдущем случае, 35% будут израсходованы на этой гусенице на преодоление сопротивления грунта, а остальная мощность пойдет на отстающую гусеницу. Из этой мощности на внешние сопротивления затратится 31 % мощности, а 34% будут переданы отстающей гусеницей тормозу и израсходуются в нем.
До сих пор никаких отличий в расходе мощности у простого дифференциала по сравнению с бортовым фрикционом и другими механизмами, работающими без циркуляции, мы не обнаружили. Но при повороте танка с бортовыми фрикционами один из них выключался, и тормозной барабан оказывался отключенным от двигателя. Поэтому приходилось удерживать тормозом только отстающую гусеницу, не давая ей увеличивать скорость. Дифференциал же сохраняет связь двигателя с тормозным барабаном. Двигатель стремится вращать отстающую полуось с той же скоростью, с какой он вращает забегающую. В силу этого часть мощности передается от двигателя через шестерни дифференциала на отстающую полуось. Эта мощность также расходуется в тормозе, так как для поворота она не нужна. Таким образом, мощность к тормозу подводится с двух сторон.
Для R= 10Bмощность, подводимая от двигателя к тормозу отстающей гусеницы, составляет 90% мощности на забегающей гусенице. Таким образом, от двигателя требуется почти удвоенная мощность (190%), причем две трети этой мощности тратятся в тормозе (см. рис, 503). Потеря мощности в тормозах танка с простым дифференциалом будет почти вчетверо больше, чем в тормозах танка с бортовыми фрикционами, если скорости поворота одинаковы.
На рис. 507 показан цилиндрический дифференциал.
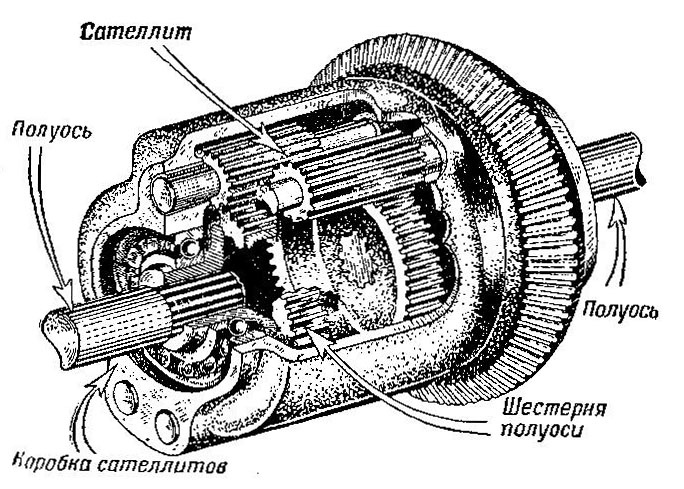
Рис.507 Устройство простого цилиндрического дифференциала
Конический и цилиндрический дифференциалы работают одинаково, но устройство их разное. В цилиндрическом дифференциале каждый сателлит связан с одной шестерней полуоси непосредственно, а с другой — через второй сателлит.
Если при неподвижной коробке сателлитов начать вращать одну полуось дифференциала, через сателлиты вращение будет передаваться другой полуоси. Эта полуось будет вращаться в обратную сторону; в этом легко убедиться, сравнивая рис. 505 и 507. Торможение одной полуоси вызывает ускоренное вращение другой полуоси в цилиндрическом дифференциале точно так же, как в коническом.
Дифференциал — очень простой механизм, не требующий особого ухода. Дифференциалы широко распространены на автомобилях, они хорошо освоены и дешевы в производстве; поэтому с точки зрения чисто производственной их выгодно использовать и на танках. Однако вследствие большого расхода мощности при повороте танка простой дифференциал вышел из употребления на танках, хотя в прошлом он применялся довольно часто, особенно на легких танках с большой удельной мощностью.